In animations, aren't we trying to model 3d objects? This kinda seems like it wouldn't be accurate enough for that. It does seem to make sense for 2d animations though.
kkkhanl
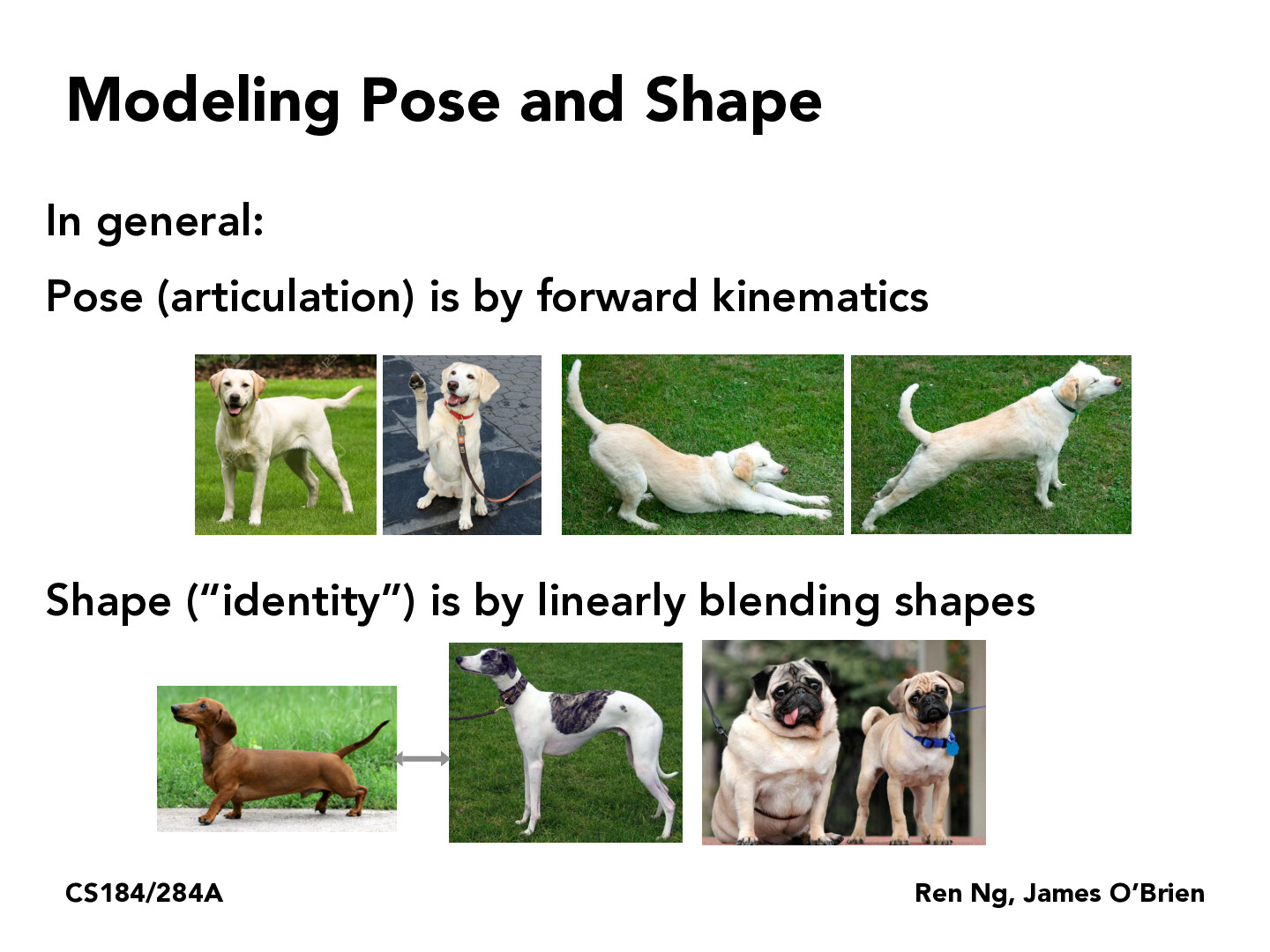
I think it is for 3D. I think the slide is saying that we get pose from calculating positions based on joint parameters (https://www.rosroboticslearning.com/forward-kinematics) and one shape is the result of blending a bunch of shapes.
In animations, aren't we trying to model 3d objects? This kinda seems like it wouldn't be accurate enough for that. It does seem to make sense for 2d animations though.
I think it is for 3D. I think the slide is saying that we get pose from calculating positions based on joint parameters (https://www.rosroboticslearning.com/forward-kinematics) and one shape is the result of blending a bunch of shapes.