Here's a cool video about using inverse kinematics for real-time character animations in a video game, while also adding stylistic "personality" to the movements. The video also uses a really cool renderer that makes the characters look like retro pixel art, even though they're actually models in a 3D scene.
wangdotjason
Will inverse kinematics always produce the most optimal way to move limbs to reach a certain point?
adityasingh7311
Based on slide 49 (https://cs184.eecs.berkeley.edu/sp23/lecture/18-49/intro-to-physical-simulation), we can use different optimization techniques to get different solutions that are optimal for their own heuristics but each solution can have its own pros and cons.
adham-elarabawy
A great example of inverse kinematics is in the control of robot arms and quadrupeds! If you take a look at MIT cheetah's published paper, they detail their inverse kinematic design and how they accounted for various complicated offsets to get the most accurate model of their robot dog!
kkkhanl
I understand why this would be helpful in a robotics setting but why would this still be useful in a computer graphics setting? If we know where we want the endpoints we can just move them there right?
Gabe-Mitnick
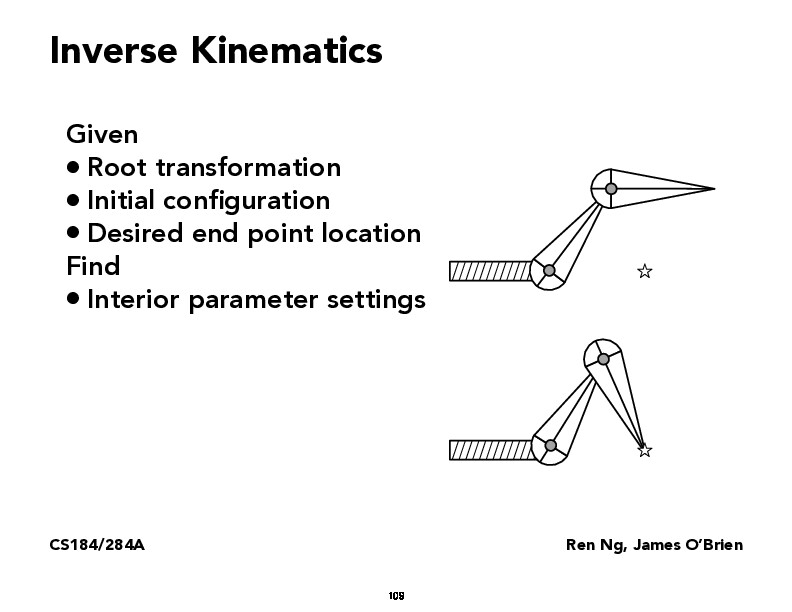
@kkkhanl Here's an example of a computer graphics problem that inverse kinematics solves: You have a character with a defined "skeleton", i.e. a set of joints and bones of fixed lengths. The chest of the character is fixed at point B and you want the hand of the character to go to point B. To do this, you have to figure out the rotation of each joint such that the hand will end at that point. Another way to look at the problem is that you're choosing where to place each joint place—you know where the chest is, and you know where you want to put the hand, but you have to choose locations for the shoulder and elbow such that all the bones stay the right length (the bone from chest to shoulder, from shoulder to elbow, and from elbow to hand).
rheask8246
Inverse kinematics, as the name implies, is the inverse setup of the forward kinematics problem: given the joint angles and angular velocities, find the position and velocity of the end effector. Since in applications we usually care about moving positions rather than joint angles, the inverse kinematics problem is usually more useful to solve (especially for robotics or graphics).
prannaypradeep999
Inverse Kinematics is generally chosen to represent joints (robots, human arms) in animations, as it allows for more realistic and intuitive movement.
Here's a cool video about using inverse kinematics for real-time character animations in a video game, while also adding stylistic "personality" to the movements. The video also uses a really cool renderer that makes the characters look like retro pixel art, even though they're actually models in a 3D scene.
Will inverse kinematics always produce the most optimal way to move limbs to reach a certain point?
Based on slide 49 (https://cs184.eecs.berkeley.edu/sp23/lecture/18-49/intro-to-physical-simulation), we can use different optimization techniques to get different solutions that are optimal for their own heuristics but each solution can have its own pros and cons.
A great example of inverse kinematics is in the control of robot arms and quadrupeds! If you take a look at MIT cheetah's published paper, they detail their inverse kinematic design and how they accounted for various complicated offsets to get the most accurate model of their robot dog!
I understand why this would be helpful in a robotics setting but why would this still be useful in a computer graphics setting? If we know where we want the endpoints we can just move them there right?
@kkkhanl Here's an example of a computer graphics problem that inverse kinematics solves: You have a character with a defined "skeleton", i.e. a set of joints and bones of fixed lengths. The chest of the character is fixed at point B and you want the hand of the character to go to point B. To do this, you have to figure out the rotation of each joint such that the hand will end at that point. Another way to look at the problem is that you're choosing where to place each joint place—you know where the chest is, and you know where you want to put the hand, but you have to choose locations for the shoulder and elbow such that all the bones stay the right length (the bone from chest to shoulder, from shoulder to elbow, and from elbow to hand).
Inverse kinematics, as the name implies, is the inverse setup of the forward kinematics problem: given the joint angles and angular velocities, find the position and velocity of the end effector. Since in applications we usually care about moving positions rather than joint angles, the inverse kinematics problem is usually more useful to solve (especially for robotics or graphics).
Inverse Kinematics is generally chosen to represent joints (robots, human arms) in animations, as it allows for more realistic and intuitive movement.