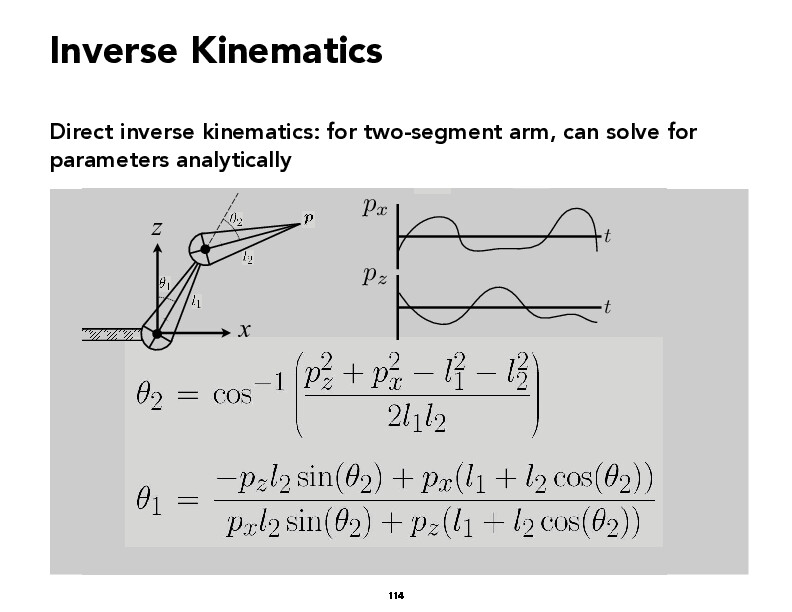
A popular solver for direct inverse kinematics is IKFast. This takes constraints defined and outputs closed-form solutions while handling failure cases like configurations that lead to infinite solutions.
typically, would we also want a trajectory to get from A to B? or does the animator provide this by moving the target point p? can direct inverse kinematics provide a trajectory?
A popular solver for direct inverse kinematics is IKFast. This takes constraints defined and outputs closed-form solutions while handling failure cases like configurations that lead to infinite solutions.
http://docs.ros.org/en/kinetic/api/moveit_tutorials/html/doc/ikfast/ikfast_tutorial.html
typically, would we also want a trajectory to get from A to B? or does the animator provide this by moving the target point p? can direct inverse kinematics provide a trajectory?