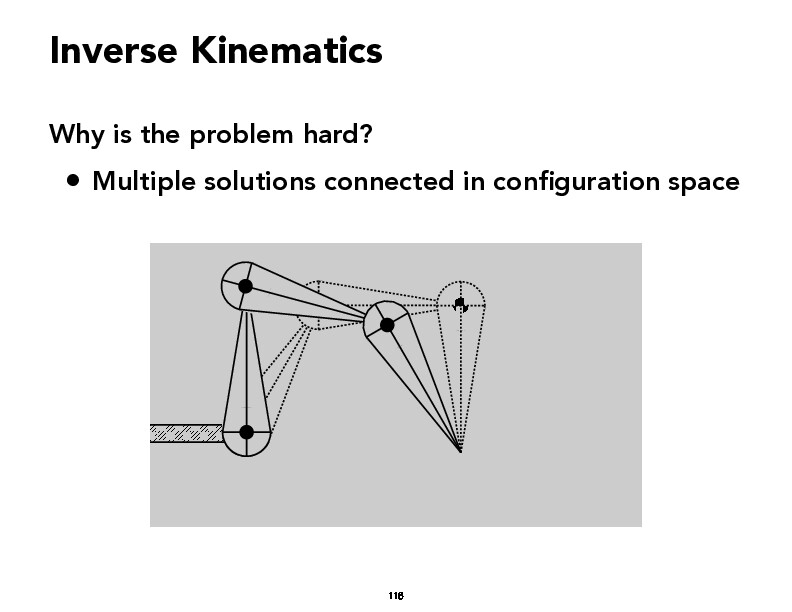
The Professor mentioned in lecture that if there are multiple solutions then we can use a heuristic (such as jerk) to minimize to choose the smoothest looking solution in the rendered graphics. But wouldn't such an optimization problem always just keep jerk (or whatever the heuristic is) to 0 always? Is that what we want?
D7ry
When there are multiple solutions, shouldn't we also consider stylistic factors? The smoothest looking animation isn't always the fittest one, right?
ncastaneda02
The multiple solution issue is definitely does not have a cut-and-dry answer. A lot of times, the solution you end up going with depends on the type of model you are simulating and the constrains you are applying to your model. Blender for example has a very robust Inverse Kinematics toolkit that selects the solution based on a number of constrains that the animator provides. You can read more about the documentation here: https://docs.blender.org/manual/en/latest/animation/armatures/posing/bone_constraints/inverse_kinematics/introduction.html. Ultimately, graphics is special in that we don't just want a correct solution, we want one that fits our vision, so we can't really get a "one size fits all" answer to issues like this which is why providing toolkits that let the user have the freedom to select which solution they think looks best is usually the way to go.
The Professor mentioned in lecture that if there are multiple solutions then we can use a heuristic (such as jerk) to minimize to choose the smoothest looking solution in the rendered graphics. But wouldn't such an optimization problem always just keep jerk (or whatever the heuristic is) to 0 always? Is that what we want?
When there are multiple solutions, shouldn't we also consider stylistic factors? The smoothest looking animation isn't always the fittest one, right?
The multiple solution issue is definitely does not have a cut-and-dry answer. A lot of times, the solution you end up going with depends on the type of model you are simulating and the constrains you are applying to your model. Blender for example has a very robust Inverse Kinematics toolkit that selects the solution based on a number of constrains that the animator provides. You can read more about the documentation here: https://docs.blender.org/manual/en/latest/animation/armatures/posing/bone_constraints/inverse_kinematics/introduction.html. Ultimately, graphics is special in that we don't just want a correct solution, we want one that fits our vision, so we can't really get a "one size fits all" answer to issues like this which is why providing toolkits that let the user have the freedom to select which solution they think looks best is usually the way to go.