I wonder if Sobel edge detection have anything to do with eigenvectors? In certain shaders which attempts to exploit variance in their filter kernels they often end up getting particular edges anyways as part of their pipeline.
longh2000
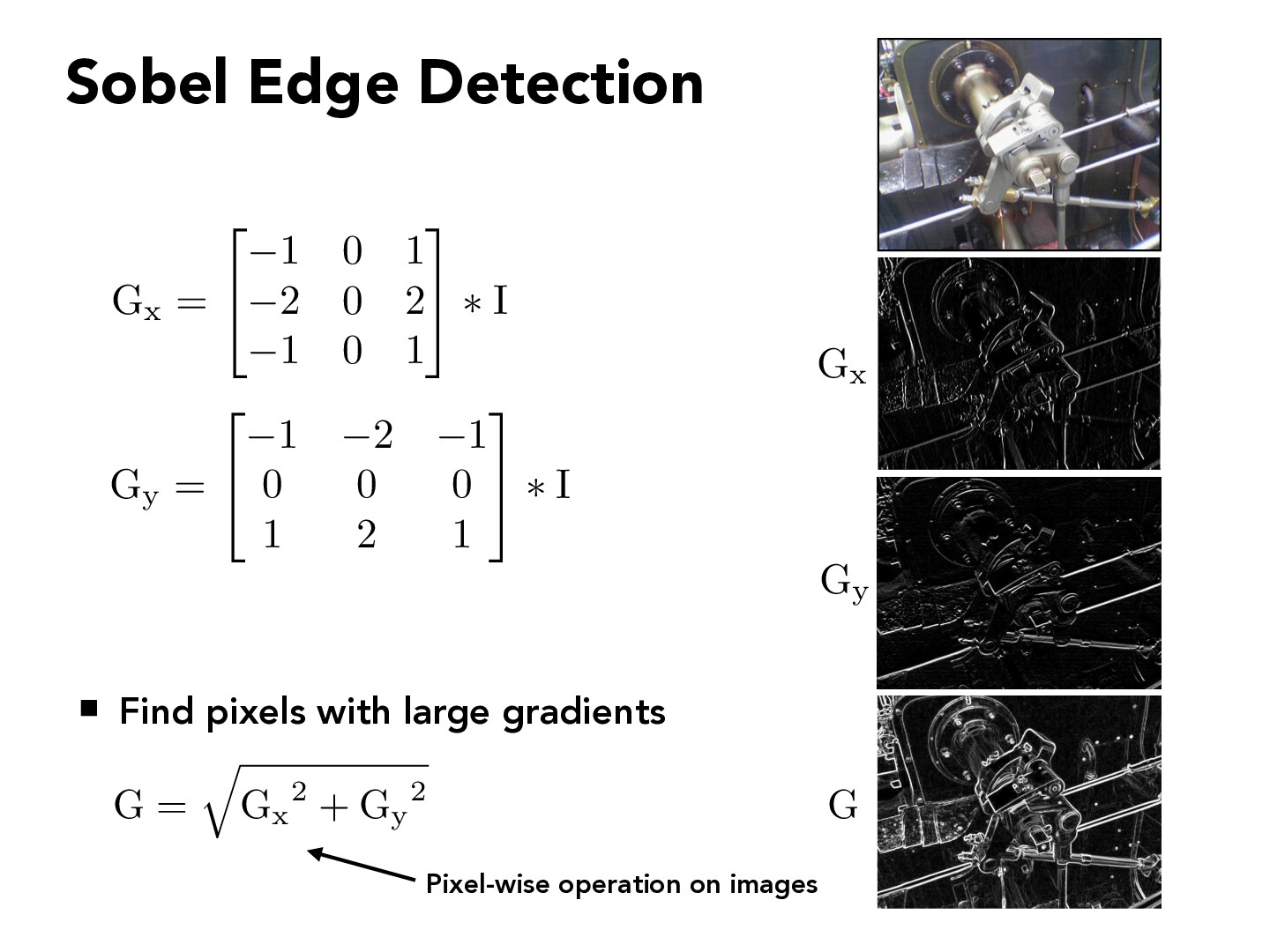
Just wondering why Gx has -2 and 2 on the second row instead of -1 and 1 like the first and third row, since that both are used for edge detection. Is it that we want the middle edge detector to be more significant?
Zc0in
It can be obtained by the convolution between [1,0,-1] and [1,2,1].The process of image processing by the Sobel operator is essentially a continuous operation of one difference and one smoothing. Where [1 0 -1] and its transpose, denote horizontal and vertical difference, respectively; [1 2 1] and its transpose, represent horizontal smoothing and vertical smoothing, respectively.
akhilvemuri
The Canny Edge detector is actually a more refined / improved version of the Sobel Edge detector, and is more widely used today https://en.wikipedia.org/wiki/Canny_edge_detector. John Canny is also a professor here at UC Berkeley, so it's quite cool to see how much the research group here has contributed to the field.
I wonder if Sobel edge detection have anything to do with eigenvectors? In certain shaders which attempts to exploit variance in their filter kernels they often end up getting particular edges anyways as part of their pipeline.
Just wondering why Gx has -2 and 2 on the second row instead of -1 and 1 like the first and third row, since that both are used for edge detection. Is it that we want the middle edge detector to be more significant?
It can be obtained by the convolution between [1,0,-1] and [1,2,1].The process of image processing by the Sobel operator is essentially a continuous operation of one difference and one smoothing. Where [1 0 -1] and its transpose, denote horizontal and vertical difference, respectively; [1 2 1] and its transpose, represent horizontal smoothing and vertical smoothing, respectively.
The Canny Edge detector is actually a more refined / improved version of the Sobel Edge detector, and is more widely used today https://en.wikipedia.org/wiki/Canny_edge_detector. John Canny is also a professor here at UC Berkeley, so it's quite cool to see how much the research group here has contributed to the field.