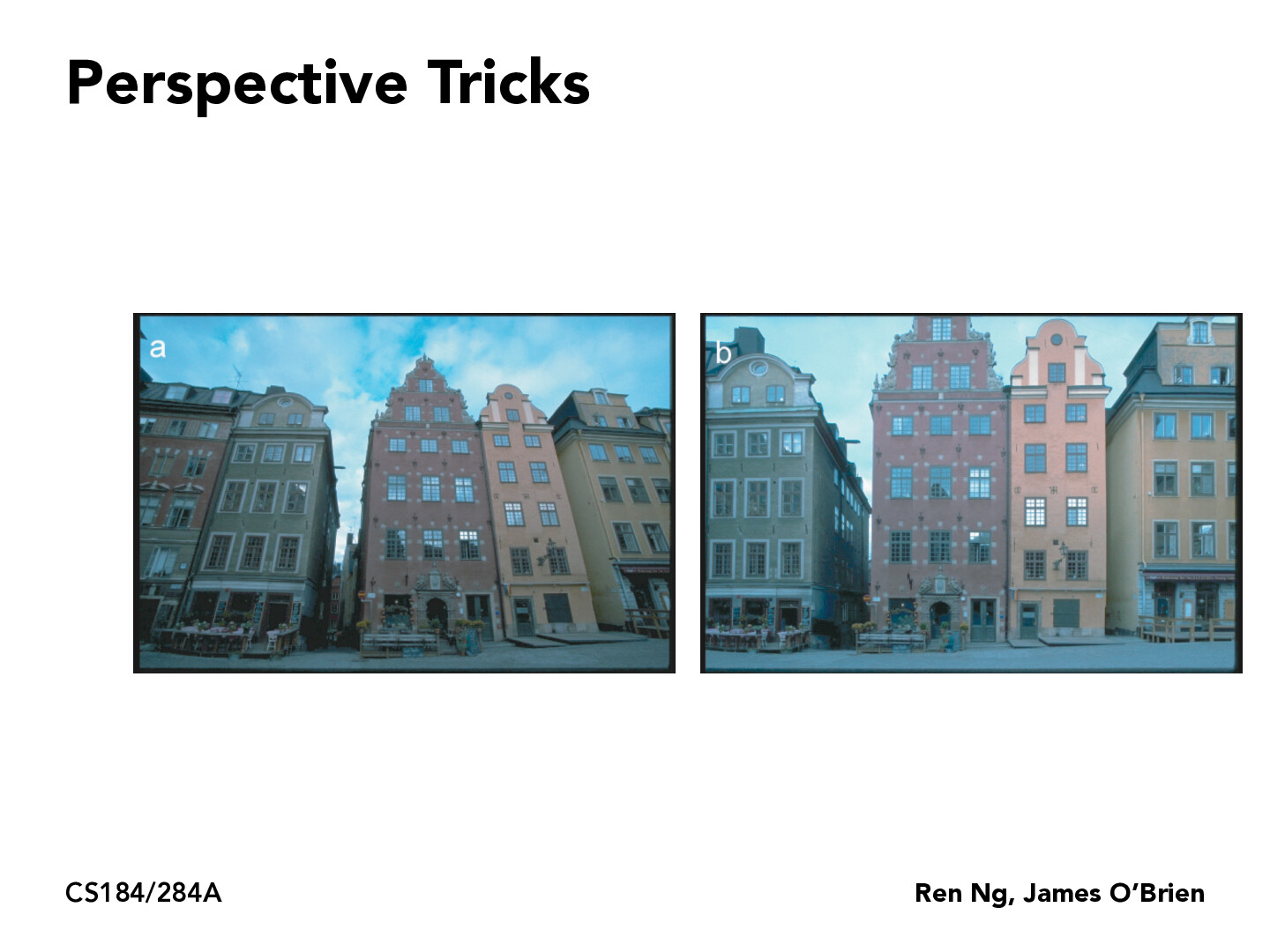
Some of the perspective distortion evident in the image on the left (image a) can actually be corrected using a calibrated image sensor map. The way this works is that a camera lens + sensor are characterized by their distortion to a black and white grid of known size, and then the inverse pixel transform is learned/analytically computed to invert the perspective distortion (such as fisheye distortion) and quazi-normalize the captured image with minimal artifacts. This is used quite a bit in 3d-printing, cnc, and in general, any scientific method that requires the use of a camera as a sensor (even in computer vision to try and standardize inputs into deep learning frameworks that are sensitive to out-of-distribution input samples).
Staffjamesfobrien
Yes, it's amazing what can be done computationally to compensate for a imperfect lens! However, the perspective distortion in image A appears because the camera's sensor plane was not parallel to the building fronts.
lwg0320
Because camera is not pointing perpendicular to the buildings, the xy plane have a vanishing point for image a. Furthermore, we see that in the z direction, we have another vanishing point -- the left and rightmost building converges to a point somewhere in them middle. By looking at how the lines go to the focal point, we can determine if the buildings are parallel with one another.
Some of the perspective distortion evident in the image on the left (image a) can actually be corrected using a calibrated image sensor map. The way this works is that a camera lens + sensor are characterized by their distortion to a black and white grid of known size, and then the inverse pixel transform is learned/analytically computed to invert the perspective distortion (such as fisheye distortion) and quazi-normalize the captured image with minimal artifacts. This is used quite a bit in 3d-printing, cnc, and in general, any scientific method that requires the use of a camera as a sensor (even in computer vision to try and standardize inputs into deep learning frameworks that are sensitive to out-of-distribution input samples).
Yes, it's amazing what can be done computationally to compensate for a imperfect lens! However, the perspective distortion in image A appears because the camera's sensor plane was not parallel to the building fronts.
Because camera is not pointing perpendicular to the buildings, the xy plane have a vanishing point for image a. Furthermore, we see that in the z direction, we have another vanishing point -- the left and rightmost building converges to a point somewhere in them middle. By looking at how the lines go to the focal point, we can determine if the buildings are parallel with one another.