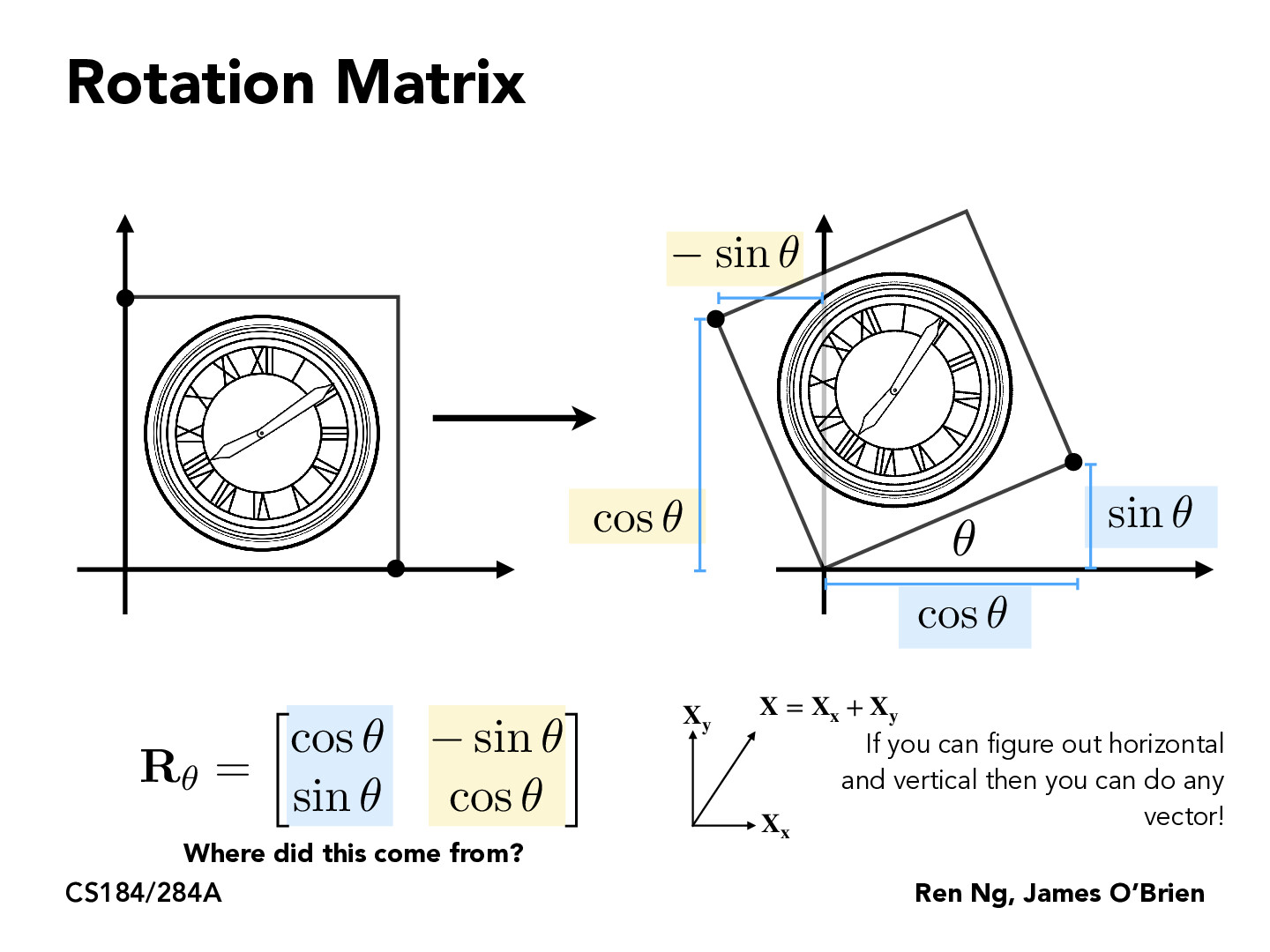
Remembering how to arrive at this RΘ matrix with this simple derivation is super handy (at least for me)! How would you extend this to 3D where say, you want to rotate about the X axis? In this case, you'd have to construct a 3x3 matrix. Could you do the same type of sketch?
sberkun
You can think of a 3d rotation around the x axis as x staying the same while y and z undergo a 2d rotation. This gives you the matrix on slide 57.
yzliu567
The x coordinate value will keep the same during the rotation around X axis. Then it's equivalent to 2D rotation when projected to YZ plane. Thus, the rotation matrix should be [[1,0,0],[0,cos, -sin],[0,sin,csos]]
Unicorn53547
For 2D rotation in this slide, we can think of it as rotating about z axis in 3D space (if we extend the matrix to
⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤.)
So for rotating about x axis in 3D sapce, we can do the same, only changing location of the elements.
zhaominl
Yeah Turns out if we spin around any axis in 3D space, we keep that coordinate value the same (by multiple 1), and apply R_theta matrix to the other two coordinates.
(Seed for discussion)
Remembering how to arrive at this RΘ matrix with this simple derivation is super handy (at least for me)! How would you extend this to 3D where say, you want to rotate about the X axis? In this case, you'd have to construct a 3x3 matrix. Could you do the same type of sketch?
You can think of a 3d rotation around the x axis as x staying the same while y and z undergo a 2d rotation. This gives you the matrix on slide 57.
The x coordinate value will keep the same during the rotation around X axis. Then it's equivalent to 2D rotation when projected to YZ plane. Thus, the rotation matrix should be [[1,0,0],[0,cos, -sin],[0,sin,csos]]
For 2D rotation in this slide, we can think of it as rotating about z axis in 3D space (if we extend the matrix to ⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤.)
So for rotating about x axis in 3D sapce, we can do the same, only changing location of the elements.
Yeah Turns out if we spin around any axis in 3D space, we keep that coordinate value the same (by multiple 1), and apply R_theta matrix to the other two coordinates.