In math Matrices can be shown with () [] or || depending on what the author likes. In code, some systems use () and some use []. Mathematica uses () and this equation might have been copied from a notebook without being edited. Also the slide deck has contributions from several people so there is variation due to that as well. The positive side of this minor sloppiness is that you get exposed to a variety of notation, which is good because papers and books are all over the place.
TinnaLiu
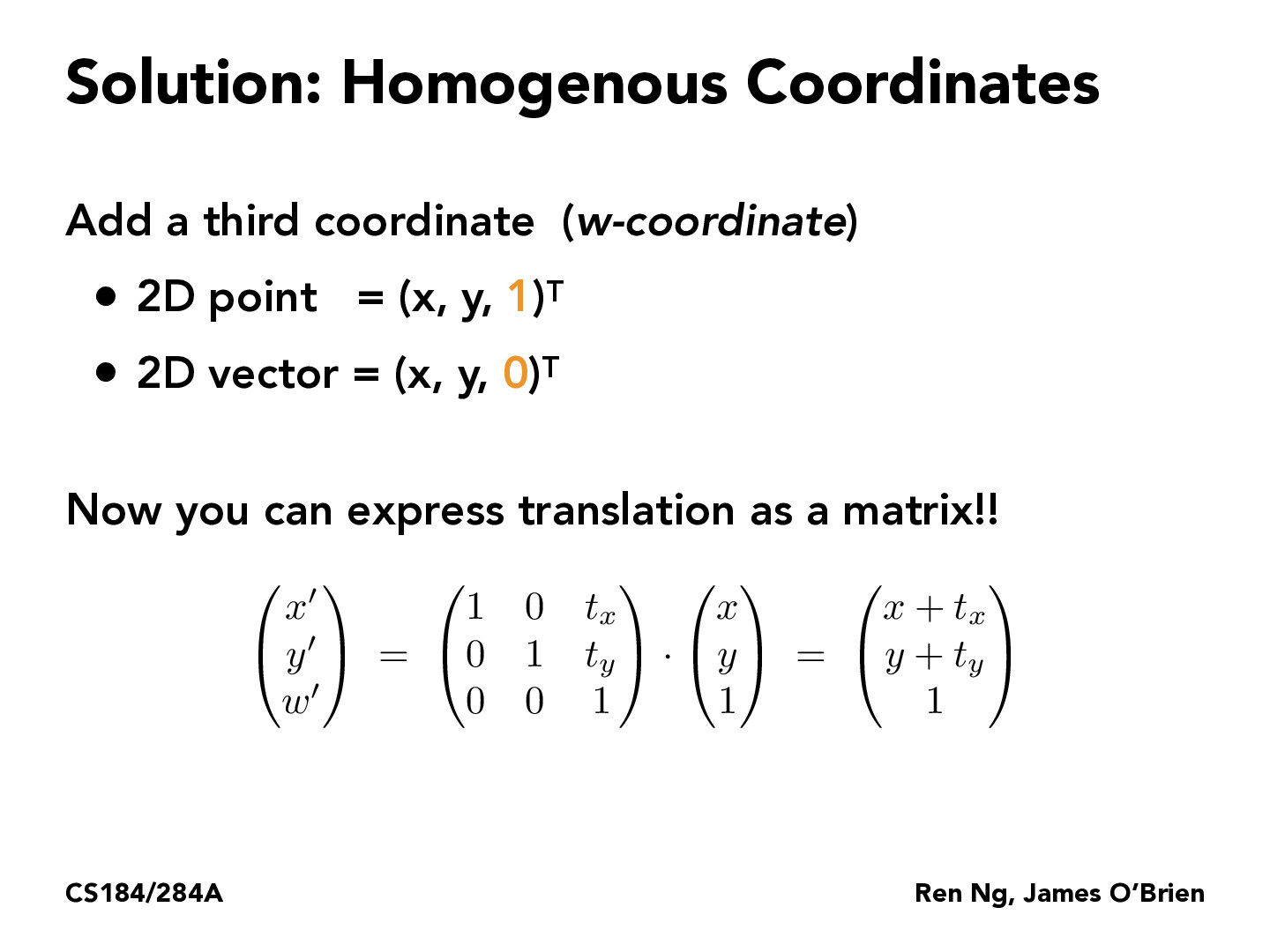
Why is the third coordinate for vector 0? I would imagine the translation for vector take a similar form as the one for point, but have (xy0) instead of (xy1) in the multiplication. If this is the case, wouldn't the resulting vector not have the added tx and ty terms?
LeslieTrue
Hi Tinna, translations in x axis and y axis won't affect the representation of a vector. This representation will only be affected by 1. rotation, which changes the vector's direction 2. change of the vector's scale.
For example, we apply a set of translation (tx, ty) on a vector of starting point (a1, b1) and ending point (a2, b2). The two points would be transformed to (a1 + tx, b1 + ty) and (a2 + tx, b2 + ty).
It's obvious that the representation of the vector doesn't change after the transformation--it's still (a2 - a1, b2 - b1).
It's similar to prove when you use the 3 dimensional representation on this slide.
Hope it make sense!
sZwX74
@TinnaLiu I think it's just a convention to distinguish points from vectors. In both cases, when applying the translation matrix, you want to end up with the same w as you started with. w=1 for points is useful because we want to make sure we scale the transformation down properly, as the point (1,2) is not the same as the point (2,4). However, vectors can be multiplied by a scalar and remain the same vector (the vector (1,2) is the same as the vector (2,4), so by having w=0 for vectors, we keep this attribute because we can scale the vector up and down however we want and w will still = 0.
geos98
Why do we choose to use a third coordinate instead of using the more intuitive presentation like Ax + b where b is a vector? Does it have to do with performance?
Does parenthesis have some semantic meaning here?
In math Matrices can be shown with () [] or || depending on what the author likes. In code, some systems use () and some use []. Mathematica uses () and this equation might have been copied from a notebook without being edited. Also the slide deck has contributions from several people so there is variation due to that as well. The positive side of this minor sloppiness is that you get exposed to a variety of notation, which is good because papers and books are all over the place.
Why is the third coordinate for vector 0? I would imagine the translation for vector take a similar form as the one for point, but have (xy0) instead of (xy1) in the multiplication. If this is the case, wouldn't the resulting vector not have the added tx and ty terms?
Hi Tinna, translations in x axis and y axis won't affect the representation of a vector. This representation will only be affected by 1. rotation, which changes the vector's direction 2. change of the vector's scale.
For example, we apply a set of translation (tx, ty) on a vector of starting point (a1, b1) and ending point (a2, b2). The two points would be transformed to (a1 + tx, b1 + ty) and (a2 + tx, b2 + ty). It's obvious that the representation of the vector doesn't change after the transformation--it's still (a2 - a1, b2 - b1).
It's similar to prove when you use the 3 dimensional representation on this slide.
Hope it make sense!
@TinnaLiu I think it's just a convention to distinguish points from vectors. In both cases, when applying the translation matrix, you want to end up with the same w as you started with. w=1 for points is useful because we want to make sure we scale the transformation down properly, as the point (1,2) is not the same as the point (2,4). However, vectors can be multiplied by a scalar and remain the same vector (the vector (1,2) is the same as the vector (2,4), so by having w=0 for vectors, we keep this attribute because we can scale the vector up and down however we want and w will still = 0.
Why do we choose to use a third coordinate instead of using the more intuitive presentation like Ax + b where b is a vector? Does it have to do with performance?