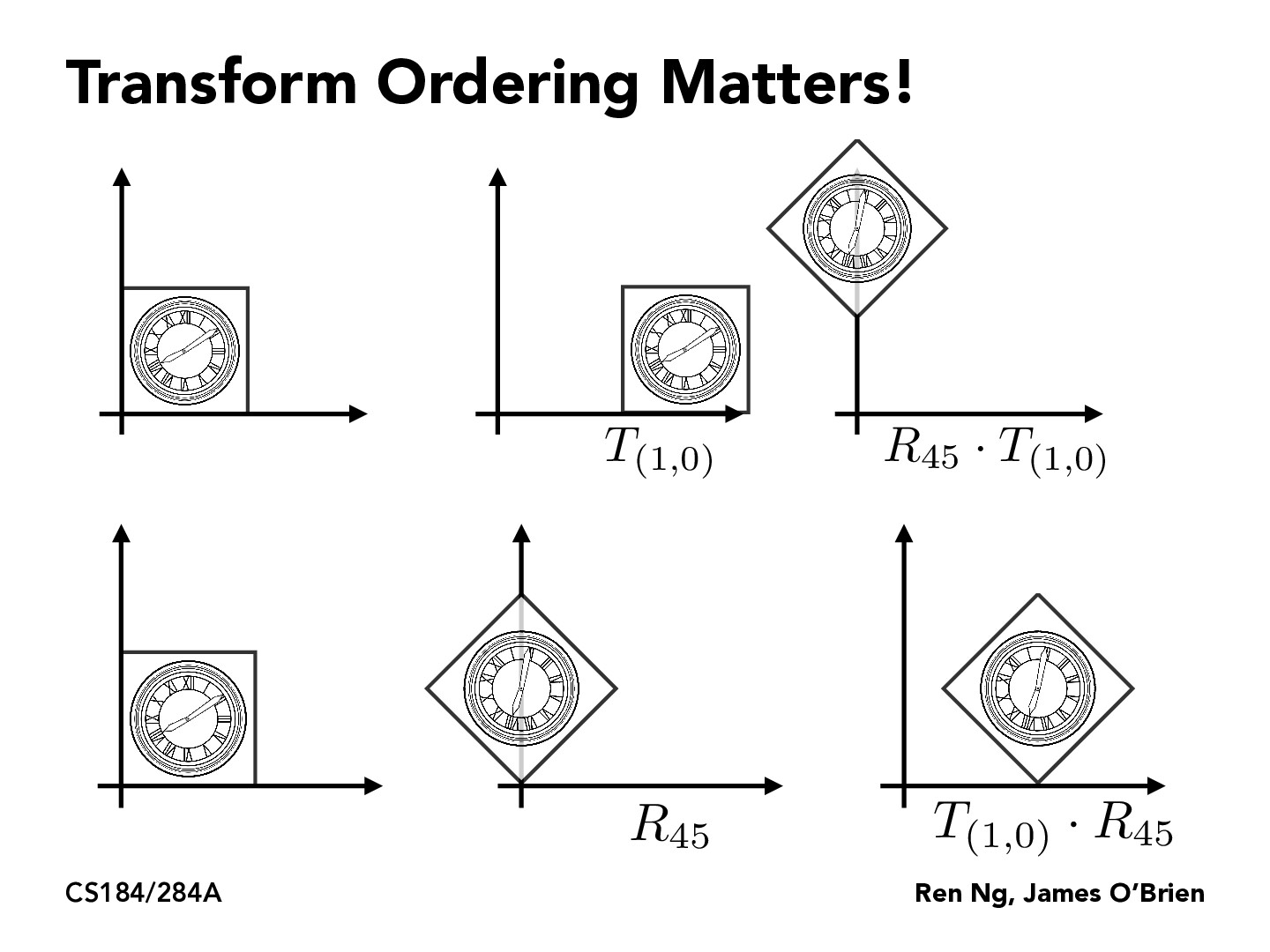
Interestingly, while the ordering of transforms matters, there are clearly an infinite number of ways to accomplish each transformation. For example, T(1,0) followed by R(45) followed by T(1,-1) would reach the same result, although R(45) followed by T(1,0) is simpler. I now wonder, if we assume there to be 3 basic transformations, if all transformations can be expressed as composites of 1 Rotation, 1 Translation, and 1 Scaling transformation. The Matrix Decompositions slide implies this is true for any transformation.
Staffjamesfobrien
Consider the SVD of a matrix.
reinaw1012
I'm taking abstract algebra right now, and this reminds me of D2n operations that we're learning about right now!
pcg108
How would we know, in the general case, what the correct order of transformations should be? That is to say, when automatically placing objects in say a video game, how do we specify the intended position of an object and determine the correct sequence of transforms to get there?
lwg0320
@pcg108 you have to place the object in your intended position (coordinate) and then you can translate the object, whether that is stretching, shrinking etc. In unity, you can do this with the transform tool!
Interestingly, while the ordering of transforms matters, there are clearly an infinite number of ways to accomplish each transformation. For example, T(1,0) followed by R(45) followed by T(1,-1) would reach the same result, although R(45) followed by T(1,0) is simpler. I now wonder, if we assume there to be 3 basic transformations, if all transformations can be expressed as composites of 1 Rotation, 1 Translation, and 1 Scaling transformation. The Matrix Decompositions slide implies this is true for any transformation.
Consider the SVD of a matrix.
I'm taking abstract algebra right now, and this reminds me of D2n operations that we're learning about right now!
How would we know, in the general case, what the correct order of transformations should be? That is to say, when automatically placing objects in say a video game, how do we specify the intended position of an object and determine the correct sequence of transforms to get there?
@pcg108 you have to place the object in your intended position (coordinate) and then you can translate the object, whether that is stretching, shrinking etc. In unity, you can do this with the transform tool!