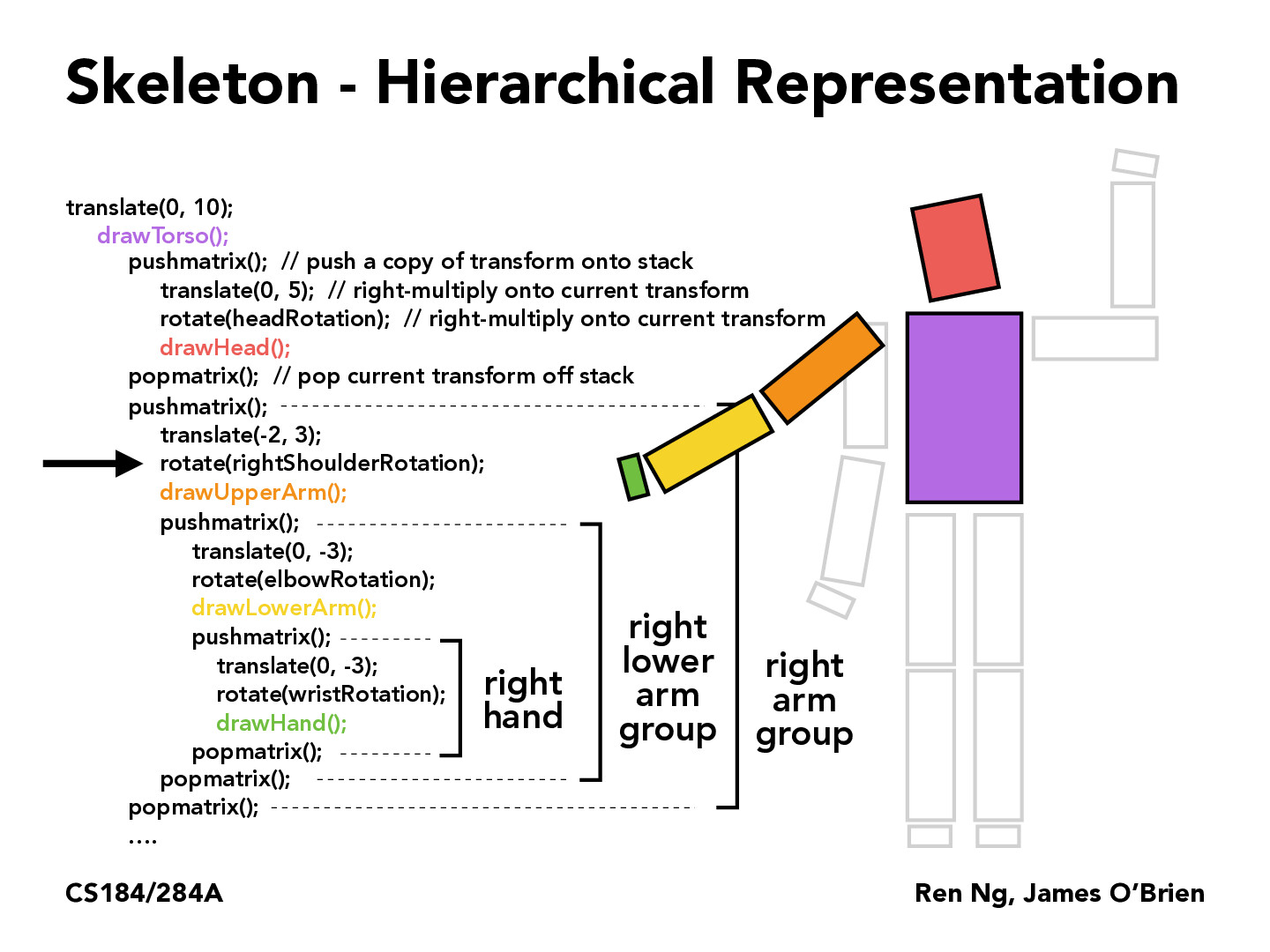
One really important and useful application of hierarchical representation is inverse kinematics for robotics (namely, robot arms and even more complex systems like quadrupeds/bipeds). These systems often involved multiple chained actuators (shoulder, then wrist, then fingers, etc), and the desired functionality is to make the end point (i.e. the finger) reach a very specific point in 3d coordinates. The matrices that govern each respective transform are worked backwards to figure out how much each actuator needs to move in order to get the perfect positioning of the end point. Inverse kinematics and forward kinematics are grounded in the chaining of transforms such as in this hierarchical representation, meaning that this is one of the enablers of many complicated and impressive robotic systems.
One really important and useful application of hierarchical representation is inverse kinematics for robotics (namely, robot arms and even more complex systems like quadrupeds/bipeds). These systems often involved multiple chained actuators (shoulder, then wrist, then fingers, etc), and the desired functionality is to make the end point (i.e. the finger) reach a very specific point in 3d coordinates. The matrices that govern each respective transform are worked backwards to figure out how much each actuator needs to move in order to get the perfect positioning of the end point. Inverse kinematics and forward kinematics are grounded in the chaining of transforms such as in this hierarchical representation, meaning that this is one of the enablers of many complicated and impressive robotic systems.