Lecture 7: Intro to Geometry, Splines, and Bezier Curves (76)
Unicorn53547
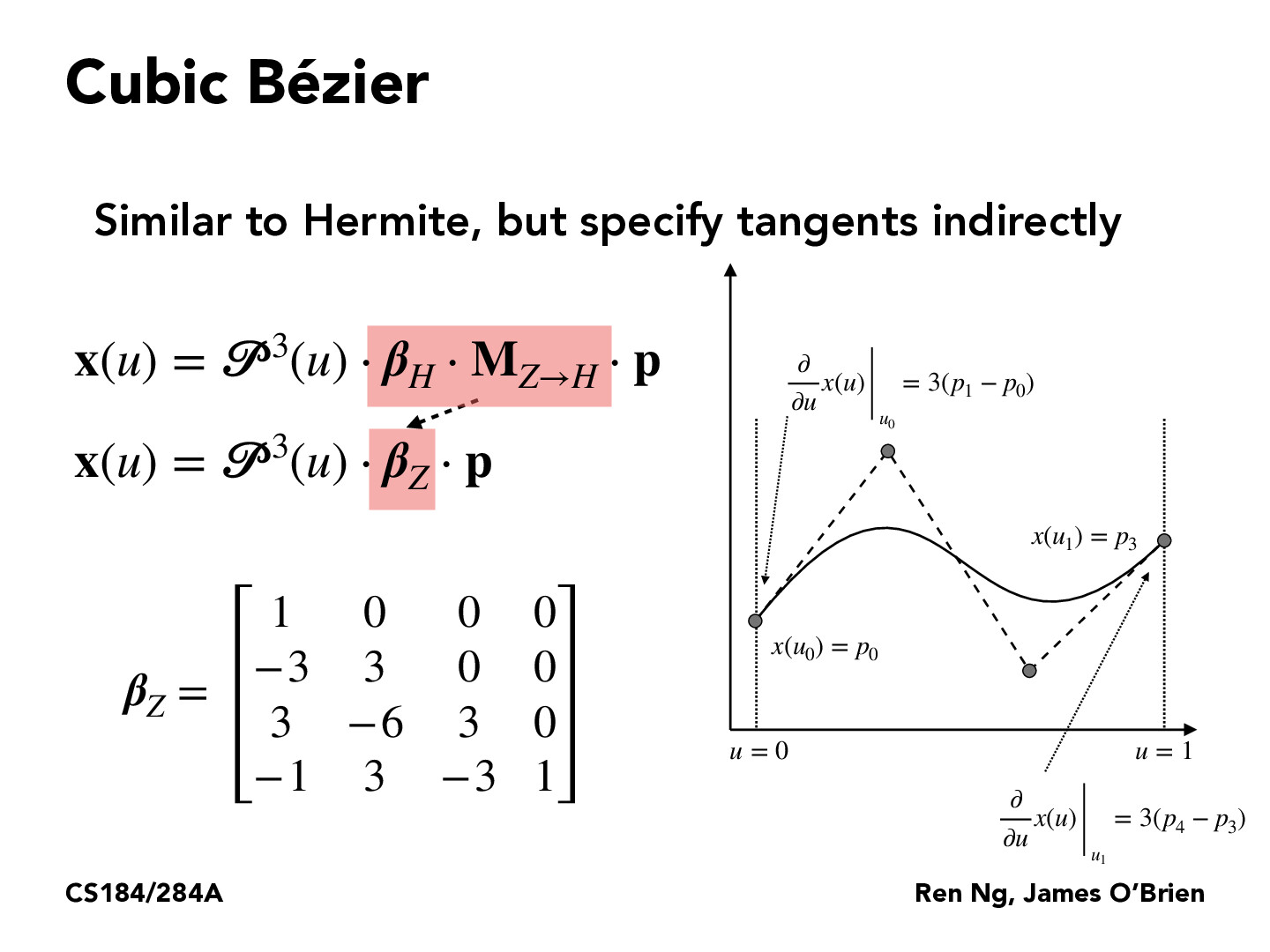
I am assuming Bezier is just a transformation of the hermite. So why do we choose the coefficient 3 (i.e., 3(p1−p0) as tangent, but not 2,4 or other numbers)? Any particular reason that 3 will make the curve fit better?
jacklishufan
I believe this can be derived from the Linear Interpolation of quadratic bezier. Namely for lines we define L_1=(1-t)p_0+t p_1; L_2=(1-t)p_1+t p_2 ;L_3=(1-t)p_2+t p_3;
Then for quadratic we define B_(0,1,2)=(1-t)L_1(t)+t L_2(t);B_(1,2,3)=(1-t)L_2(t)+t L_3(t); Then the cubic is the linear interpolation of the two quadratic bezier, which can be explicitly written as (1-t)^3p0+3(1-t)^2t p1+3(1-t)t^2p2+t^3p3. Taking the first order differential and evaluate at t=0 and t=1 we have 3p1-3p0 and 3p3-3p2
jacklishufan
Also can the stuff confirm if there are typo on this page. In the graph the points are indexed as p0,p1,p2,p3 , but in the differential equation we have 3(p4-p3), what is p4 (the 5th point???)
Staffjamesfobrien
Sorry, p3-p2.
The 3 could be any number except zero, but by using 3 the basis functions end up summing to 1 and we get convex hull property, which is nice.
I am assuming Bezier is just a transformation of the hermite. So why do we choose the coefficient 3 (i.e., 3(p1−p0) as tangent, but not 2,4 or other numbers)? Any particular reason that 3 will make the curve fit better?
I believe this can be derived from the Linear Interpolation of quadratic bezier. Namely for lines we define L_1=(1-t)p_0+t p_1; L_2=(1-t)p_1+t p_2 ;L_3=(1-t)p_2+t p_3; Then for quadratic we define B_(0,1,2)=(1-t)L_1(t)+t L_2(t);B_(1,2,3)=(1-t)L_2(t)+t L_3(t); Then the cubic is the linear interpolation of the two quadratic bezier, which can be explicitly written as (1-t)^3p0+3(1-t)^2t p1+3(1-t)t^2p2+t^3p3. Taking the first order differential and evaluate at t=0 and t=1 we have 3p1-3p0 and 3p3-3p2
Also can the stuff confirm if there are typo on this page. In the graph the points are indexed as p0,p1,p2,p3 , but in the differential equation we have 3(p4-p3), what is p4 (the 5th point???)
Sorry, p3-p2.
The 3 could be any number except zero, but by using 3 the basis functions end up summing to 1 and we get convex hull property, which is nice.