Lecture 9: Intro to Ray-Tracing & Accelerating Ray-Scene Intersection (40)
Shruteek
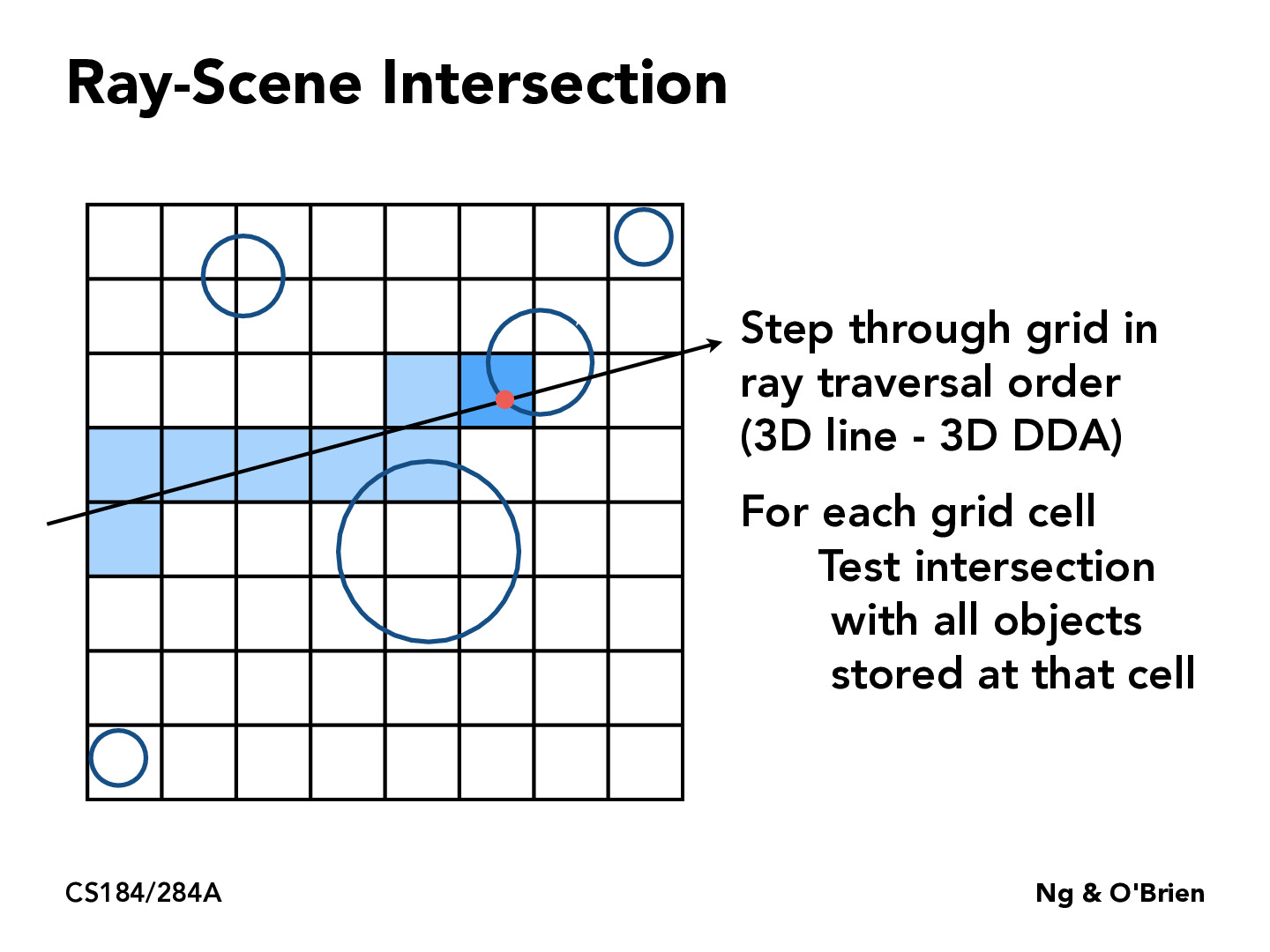
For the sake of efficiency, we are optimizing the grid size to avoid too many traversals and intersection-checks. However, every time we DO do an intersection check inside a bounding box, we may still have inefficiencies with regards to checking intersections themselves, espeially with weird object shapes and equations (which can be simplified through bounding meshes). This means, if we repeatedly check the same intersections across different boxes in a grid, this division is only efficient if we avoid systems that require many intersection checks. Even if we do not check multiple intersections, this may still be more costly if checking which grid box we are traversing is even slightly expensive, since we will most likely be traversing FAR more grid boxes than objects.
For the sake of efficiency, we are optimizing the grid size to avoid too many traversals and intersection-checks. However, every time we DO do an intersection check inside a bounding box, we may still have inefficiencies with regards to checking intersections themselves, espeially with weird object shapes and equations (which can be simplified through bounding meshes). This means, if we repeatedly check the same intersections across different boxes in a grid, this division is only efficient if we avoid systems that require many intersection checks. Even if we do not check multiple intersections, this may still be more costly if checking which grid box we are traversing is even slightly expensive, since we will most likely be traversing FAR more grid boxes than objects.