Lecture 9: Intro to Ray-Tracing & Accelerating Ray-Scene Intersection (43)
mylinhvu11
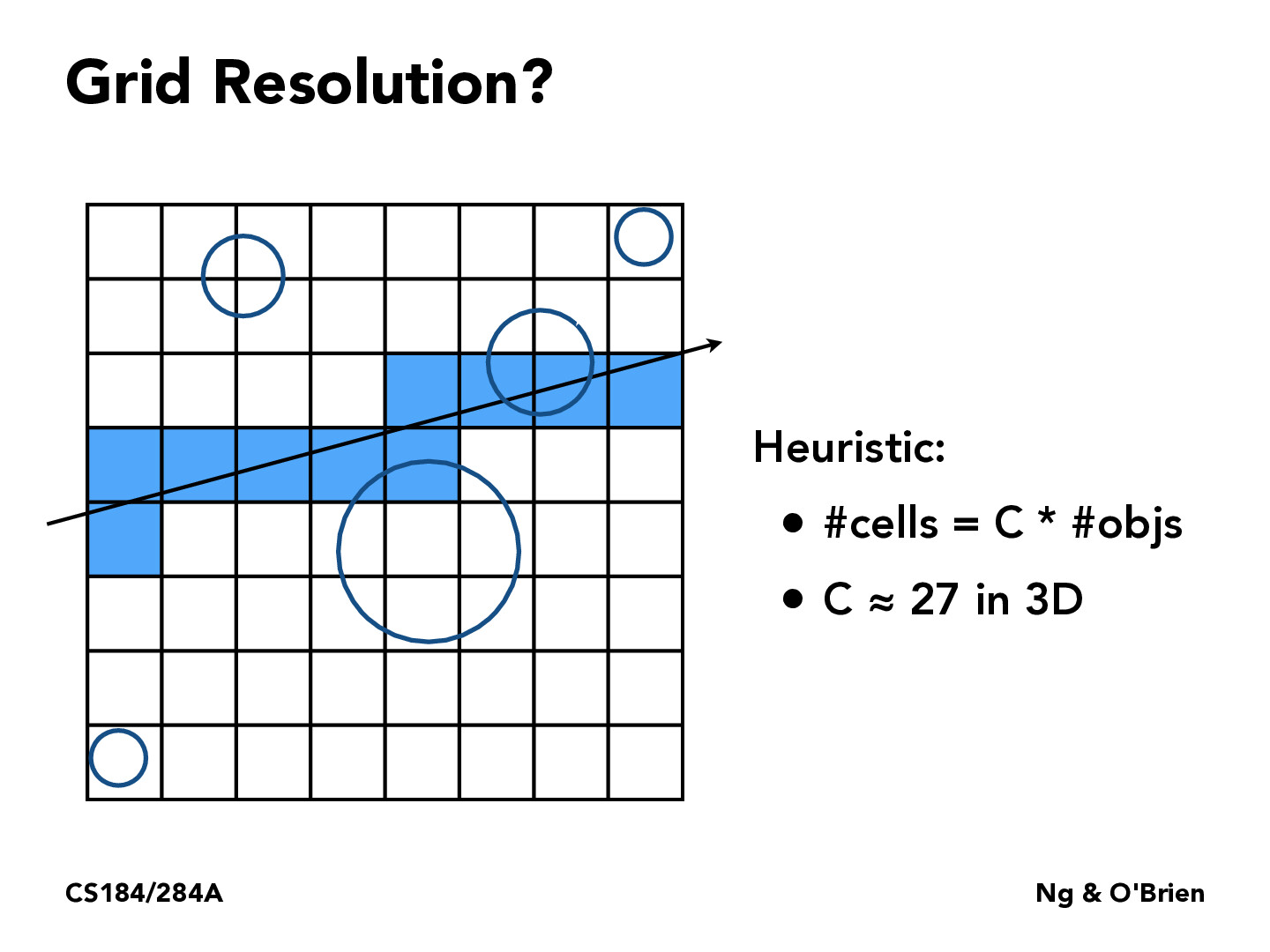
I understand the method in determining the amount of cells for the bounded grid region, but I'd like clarification on the C value and where it comes from. Is it always defaulted for 27 in all 3D objects or only specific objects. What if we are trying to compute cells for a 2D object angled on the screen, would that still be considered 3D and utilizing this heuristic?
SeanW0823
From my understanding, this heuristic is a very general one that is suited for scenes with uniform properties (i.e. objects are reasonably evenly distributed in the scene). Therefore, the C value would change according to the scene in which ray tracing is performed.
Staffyirenng
Thanks for the comments! @SeanW0823 has it right. C approximately equal to 27 is a rule of thumb that seems to work for 3D scenes with uniformly distributed geometry reasonably for certain software implementations.
Probably 2732 might be a good choice for 2D...
Staffyirenng
But we will discuss more robust, adaptive and hierarchical data structures for acceleration next (KD trees and BVHs). We will also touch on a way to think about the optimal way to choose the analogous parameters for those data structures -- the overarching insight is to choose parameters that minimize the average cost of intersecting a ray.
I understand the method in determining the amount of cells for the bounded grid region, but I'd like clarification on the C value and where it comes from. Is it always defaulted for 27 in all 3D objects or only specific objects. What if we are trying to compute cells for a 2D object angled on the screen, would that still be considered 3D and utilizing this heuristic?
From my understanding, this heuristic is a very general one that is suited for scenes with uniform properties (i.e. objects are reasonably evenly distributed in the scene). Therefore, the C value would change according to the scene in which ray tracing is performed.
Thanks for the comments! @SeanW0823 has it right. C approximately equal to 27 is a rule of thumb that seems to work for 3D scenes with uniformly distributed geometry reasonably for certain software implementations.
Probably 2732 might be a good choice for 2D...
But we will discuss more robust, adaptive and hierarchical data structures for acceleration next (KD trees and BVHs). We will also touch on a way to think about the optimal way to choose the analogous parameters for those data structures -- the overarching insight is to choose parameters that minimize the average cost of intersecting a ray.