Next, let's add support for cloth collision with other objects in the scene to make things more interesting.
Take a look at the collision/ directory, which contains struct definitions for a sphere and a plane. For both sphere.cpp and plane.cpp, you will implement the collide method. At a high level, the collide method will determine whether or not a given point mass is inside the primitive. If it is, we adjust the point mass's position so that it stays just outside the primitive's surface, accounting for friction as we do so.
3.1: Handling collisions with spheres
Before writing any code, look at the struct definition for a sphere in collision/sphere.h.
Implement Sphere::collide, which takes in a point mass and adjusts its position if it intersects with or is inside the sphere. If the point mass intersects with or is inside the sphere, then "bump" it up to the surface of the sphere:
- Compute where the point mass should have intersected the sphere by extending the path between its 'position' and the sphere's origin to the sphere's surface. Call the surface intersection point the tangent point.
- Compute the correction vector needed to be applied to the point mass's
last_positionin order to reach the tangent point. - Finally, let the point mass's new
positionbe itslast_positionadjusted by the above correction vector, scaled down by friction (i.e. scaled by ).
Make sure to update Cloth::simulate to account for potential collisions - for every PointMass, you will want to try to collide it with every possible CollisionObject.
Test your implementation
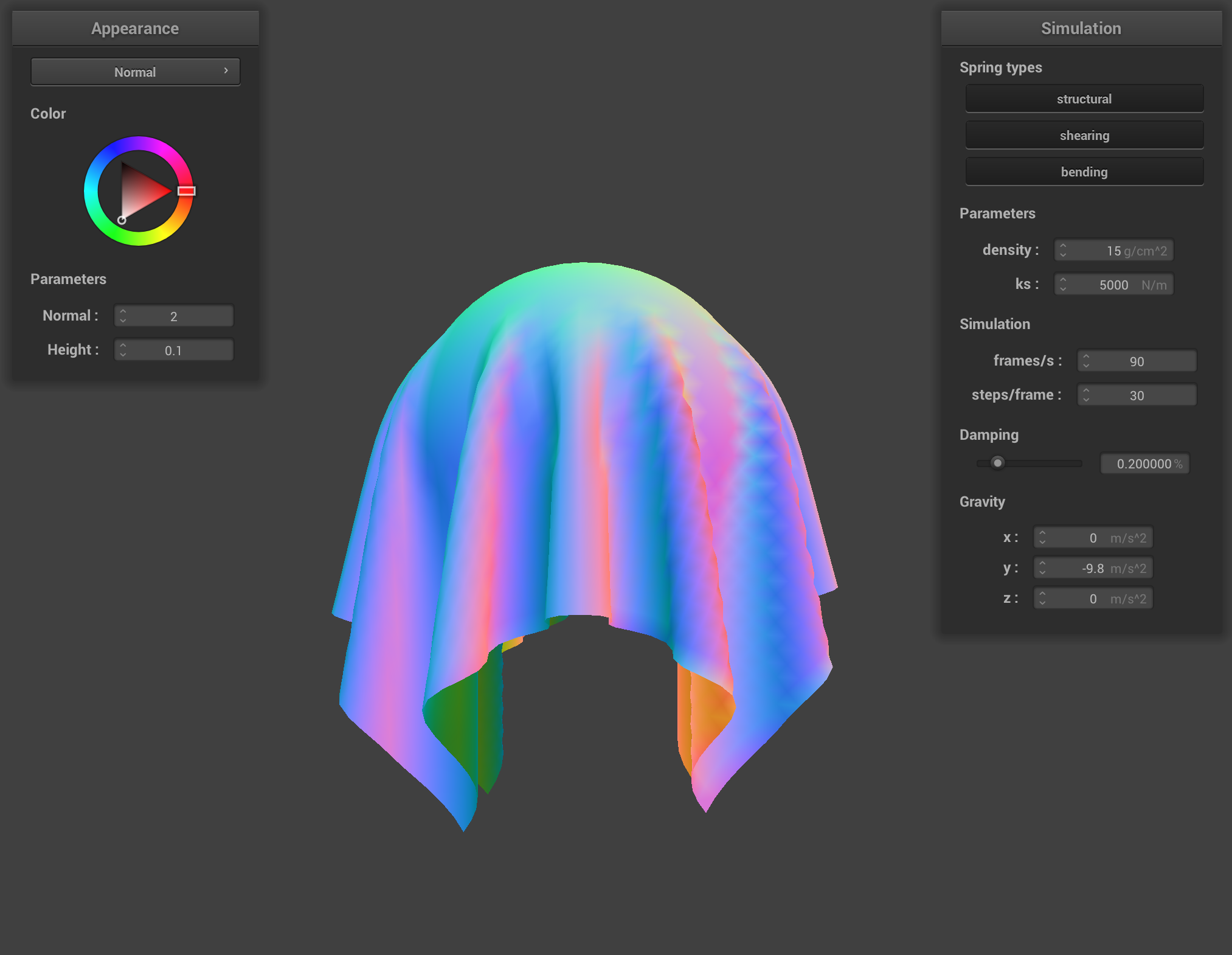
./clothsim -f ../scene/sphere.json
You should see your cloth fall on a sphere and drape itself over it before coming to rest. Do not worry if you get Wireframe: warning: did not find attrib in_normal.
3.2: Handling collisions with planes
Before writing any code, look at the struct definition for a plane in collision/plane.h.
Implement Plane::collide, which takes in a point mass and adjusts its position if it is "inside" the plane, which we define to be when the point moves from one side of the plane to the other in the last time step. If the point mass crosses over, then we "bump" it back up to the side of the surface it originated from:
- Compute where the point mass should have intersected the plane, if it had travelled in a straight line from its
positiontowards the plane. Call this the tangent point. - Compute the correction vector needed to be applied to the point mass's
last_positionin order to reach a point slightly above the tangent point, on the same side of the plane that the point mass was before crossing over. We have provided a small constantSURFACE_OFFSETfor this small displacement. - Finally, let the point mass's new
positionbe itslast_positionadjusted by the above correction vector, scaled down by friction (i.e. scaled by ).
Test your implementation
./clothsim -f ../scene/plane.json
You should see your cloth fall slowly onto the plane and stop at its surface.
Part 3 Deliverables
- Show us screenshots of your shaded cloth from scene/sphere.json in its final resting state on the sphere using the default
ks = 5000as well as withks = 500andks = 50000. Describe the differences in the results. - Show us a screenshot of your shaded cloth lying peacefully at rest on the plane. If you haven't by now, feel free to express your colorful creativity with the cloth! (You will need to complete the shaders portion first to show custom colors.)