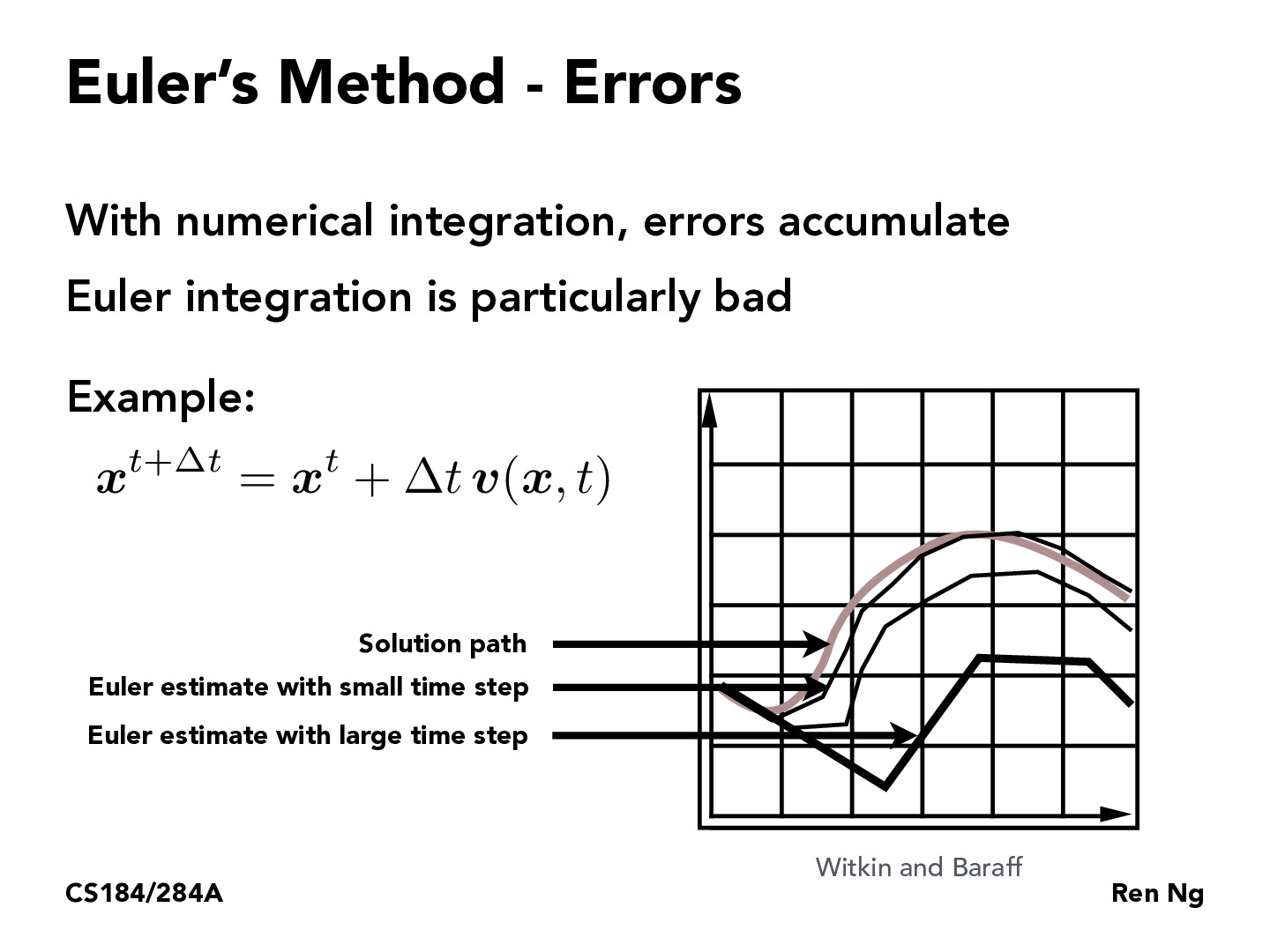
A caveat I found interesting about this error graph is that, although the path taken is clearly inaccurate for large timesteps, the main issue is actually the smoothness of the line rather than how well it approximates the true path it should take. This is because simulations are more concerned about controlling error, which builds up and later on grows to model a completely different path.
jinweiwong
This reminds me of the problem of controlling the motion of the robot car in EECS 16B. If we had a poorly designed algorithm, errors would accumulate overtime, and the robot would spin in circles. So, we want an algorithm that attenuates errors overtime to keep the robot in control.
AlsonC
@Bill-Shao I never thought about this like that! I can't imagine trying to make an animation with that many stutters look realistic. However, I wonder how this differs from stop-motion animation, which pieces together enough frames to make animations look realistic.
jananisriram
Do we just use validation to figure out the time step that's most optimal for the given data?
AXM78251
Yeah, adding onto that, I think that one of the other methods discussed in these slides (slide 31) includes Adaptive step size which is widely popular and allows us to recurse until we get a reasonable error!
grafour
recommend looking at the review session problem for a more explicit example haha
brandonlouie
We can see that decreasing our time step would result in a trajectory that is more stable and more closely resembles the solution trajectory. I'm interested to know in what cases a smaller time step is sufficient compared to using Implicit or modified Euler methods
A caveat I found interesting about this error graph is that, although the path taken is clearly inaccurate for large timesteps, the main issue is actually the smoothness of the line rather than how well it approximates the true path it should take. This is because simulations are more concerned about controlling error, which builds up and later on grows to model a completely different path.
This reminds me of the problem of controlling the motion of the robot car in EECS 16B. If we had a poorly designed algorithm, errors would accumulate overtime, and the robot would spin in circles. So, we want an algorithm that attenuates errors overtime to keep the robot in control.
@Bill-Shao I never thought about this like that! I can't imagine trying to make an animation with that many stutters look realistic. However, I wonder how this differs from stop-motion animation, which pieces together enough frames to make animations look realistic.
Do we just use validation to figure out the time step that's most optimal for the given data?
Yeah, adding onto that, I think that one of the other methods discussed in these slides (slide 31) includes Adaptive step size which is widely popular and allows us to recurse until we get a reasonable error!
recommend looking at the review session problem for a more explicit example haha
We can see that decreasing our time step would result in a trajectory that is more stable and more closely resembles the solution trajectory. I'm interested to know in what cases a smaller time step is sufficient compared to using Implicit or modified Euler methods