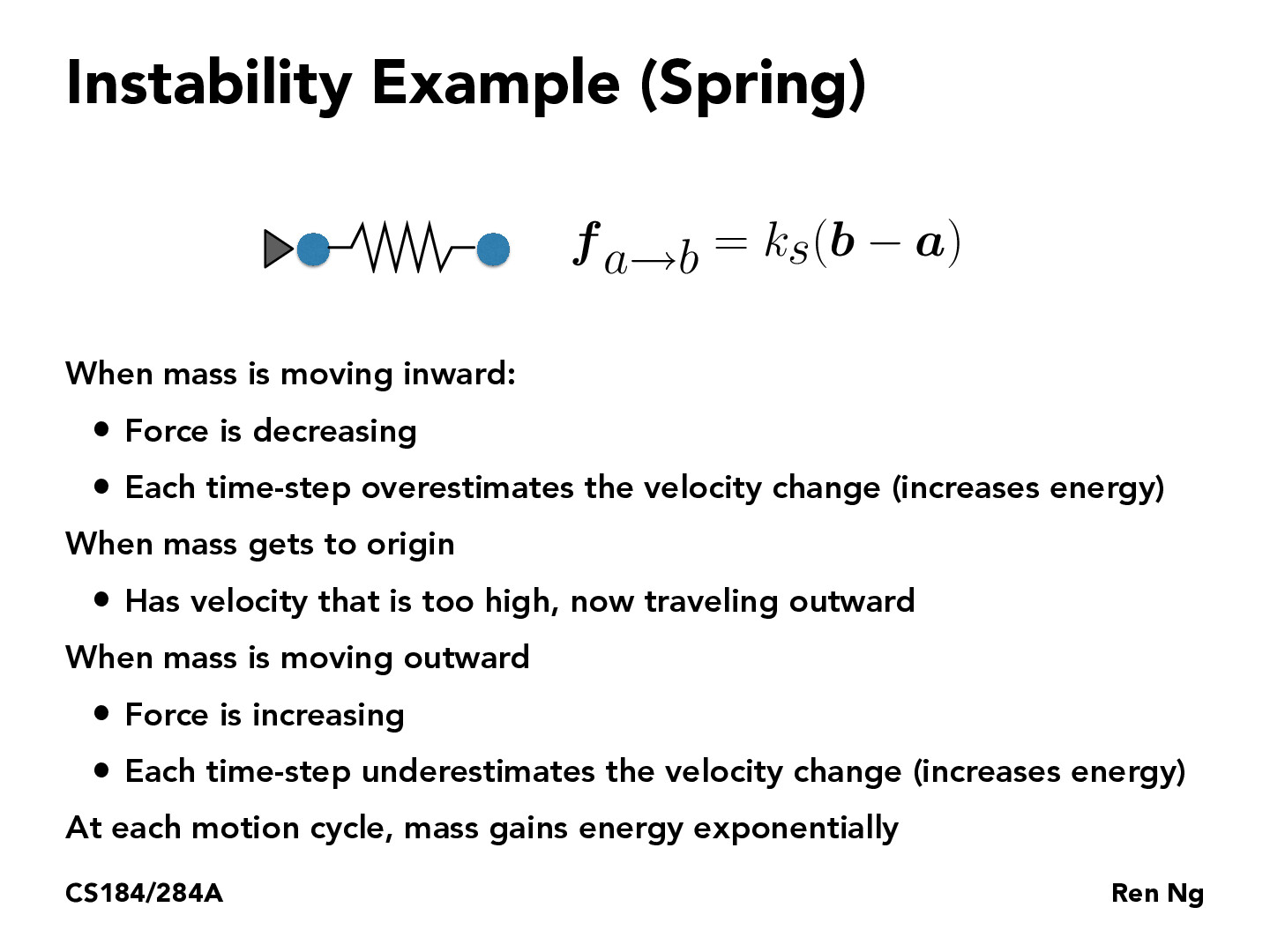
I think now is the best time to actually a free body diagram, as it gives more intuition as to why there are SO many opposite facing values. For instance, it turns out that the movement is completely OPPOSITE the force In other words, the spring will always be moving in a different direction to the force, as this is what causes the spring to have a pretty "jerky" motion.
aidangarde
Can we fix this problem with basic clamping as we did in project 4, where each spring had a maximum length. In this case, if each particle has a minimum and maximum, then force would never pass a theoretical maximum, and the system would always be stable. Obviously this approximation may lead to worse results, but I imagine that most systems would look pretty close to the real phenomenon.
I think now is the best time to actually a free body diagram, as it gives more intuition as to why there are SO many opposite facing values. For instance, it turns out that the movement is completely OPPOSITE the force In other words, the spring will always be moving in a different direction to the force, as this is what causes the spring to have a pretty "jerky" motion.
Can we fix this problem with basic clamping as we did in project 4, where each spring had a maximum length. In this case, if each particle has a minimum and maximum, then force would never pass a theoretical maximum, and the system would always be stable. Obviously this approximation may lead to worse results, but I imagine that most systems would look pretty close to the real phenomenon.