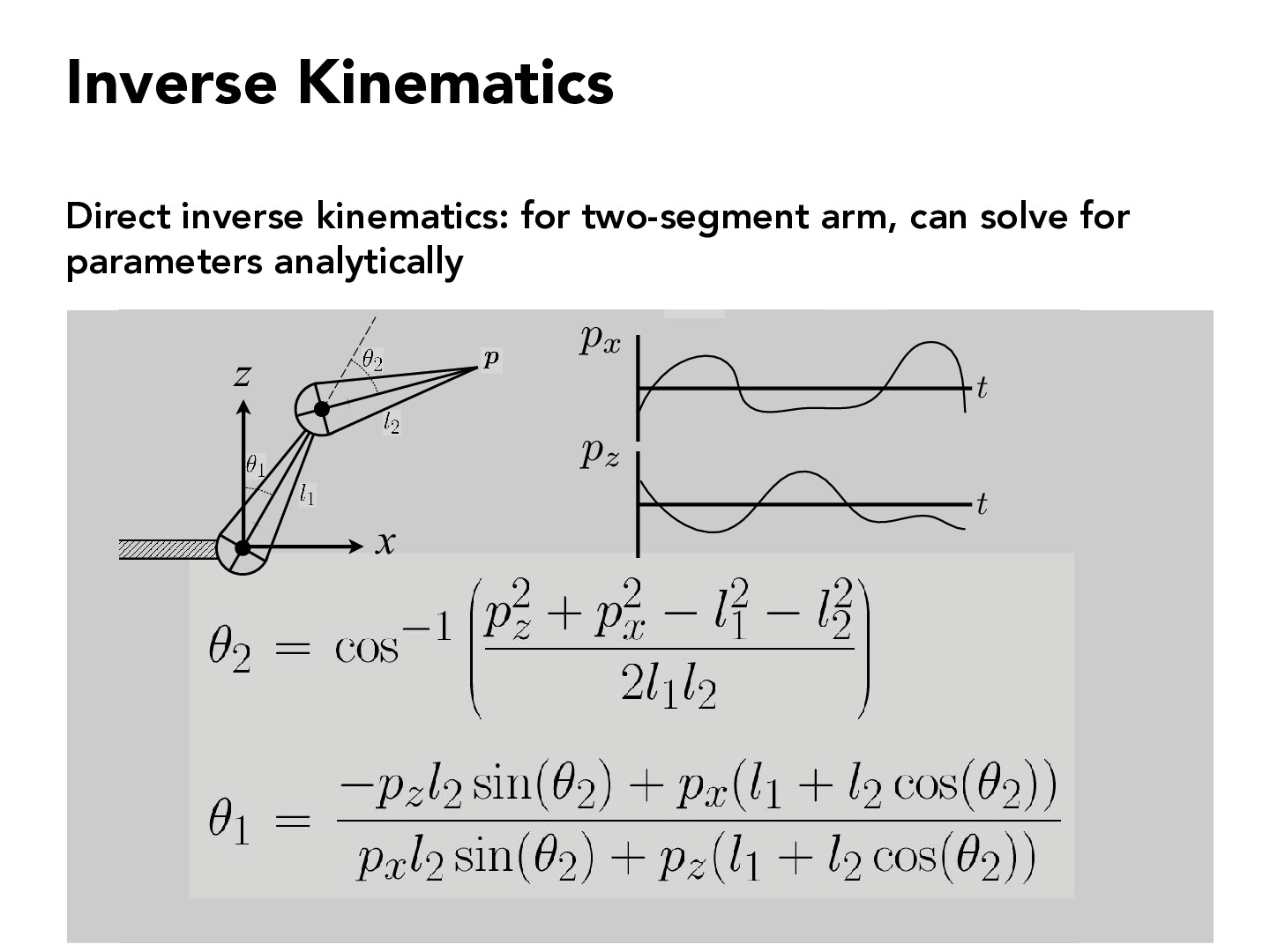
I remember learning of inverse kinematics in EECS106A, and we discussed the usage of the Padan-Kahan subproblems to solve for joint angles/parameters. We never really got into the details of solving Padan-Kahan subproblems, and only got as far as saying that if we can reduce to these subproblems, then we can find the joint angles. I'm wondering what is meant by "solve for parameters analytically". Is there another, maybe even more simple way to solve for joint angles without Padan-Kahan?
el-refai
The interesting thing about inverse kinematics is how there are an infinite number of solutions to this joint setup. So when doing animation it's not only enough to get the right end effector position but also to have the joints move in the right direction. i.e. not bending the elbow the wrong way
agao25
That's interesting, during the midterm 2 review session, the TAs said it's false that there cannot be multiple solutions in a continuous parameter space for a desired effector position. I feel like the exact angle setup is included in part of the answer, so while there may be a bunch of different setups, each one contributes to a separate answer.
I remember learning of inverse kinematics in EECS106A, and we discussed the usage of the Padan-Kahan subproblems to solve for joint angles/parameters. We never really got into the details of solving Padan-Kahan subproblems, and only got as far as saying that if we can reduce to these subproblems, then we can find the joint angles. I'm wondering what is meant by "solve for parameters analytically". Is there another, maybe even more simple way to solve for joint angles without Padan-Kahan?
The interesting thing about inverse kinematics is how there are an infinite number of solutions to this joint setup. So when doing animation it's not only enough to get the right end effector position but also to have the joints move in the right direction. i.e. not bending the elbow the wrong way
That's interesting, during the midterm 2 review session, the TAs said it's false that there cannot be multiple solutions in a continuous parameter space for a desired effector position. I feel like the exact angle setup is included in part of the answer, so while there may be a bunch of different setups, each one contributes to a separate answer.