Even though its so simple, I like how instead of dealing with point arithmetic (3d vector representing 2d), we can simply repoint it to the origin and then apply translations and repoint it back by shifting by a constant on all axis. Pretty neat
zepluc
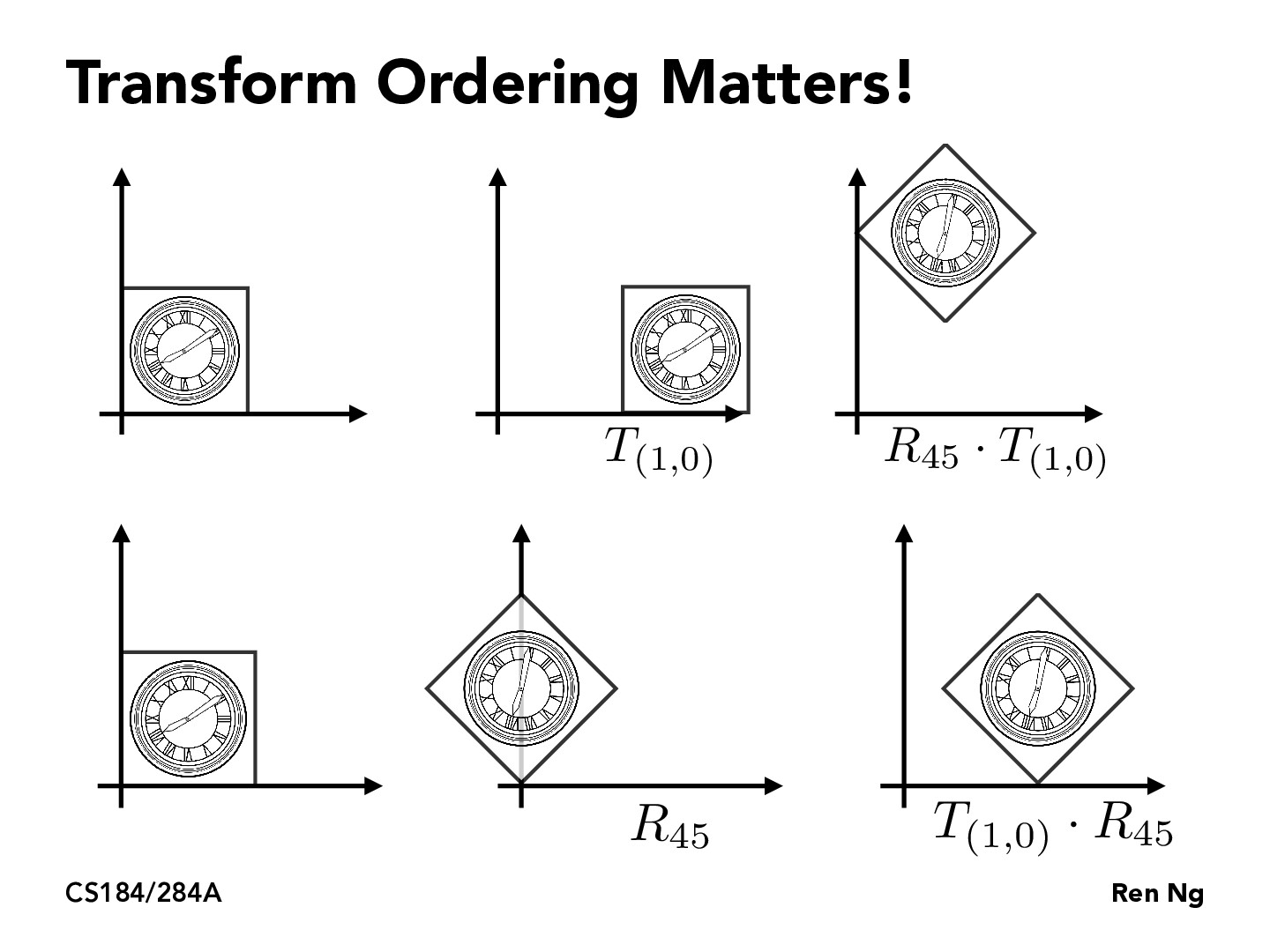
It is really important to remember that if we rotate then translate, we need to do T(1,0) * R(45) instead of R(45) * T(1,0).
AnikethPrasad
After going through a few practice problems, I've noticed that transform ordering doesn't matter in certain cases. What are these cases where transform ordering does not matter?
AnikethPrasad
Are there any strategies for solving composite transforms which is not simply solving for each point and writing out each matrix multiplication?
Even though its so simple, I like how instead of dealing with point arithmetic (3d vector representing 2d), we can simply repoint it to the origin and then apply translations and repoint it back by shifting by a constant on all axis. Pretty neat
It is really important to remember that if we rotate then translate, we need to do T(1,0) * R(45) instead of R(45) * T(1,0).
After going through a few practice problems, I've noticed that transform ordering doesn't matter in certain cases. What are these cases where transform ordering does not matter?
Are there any strategies for solving composite transforms which is not simply solving for each point and writing out each matrix multiplication?