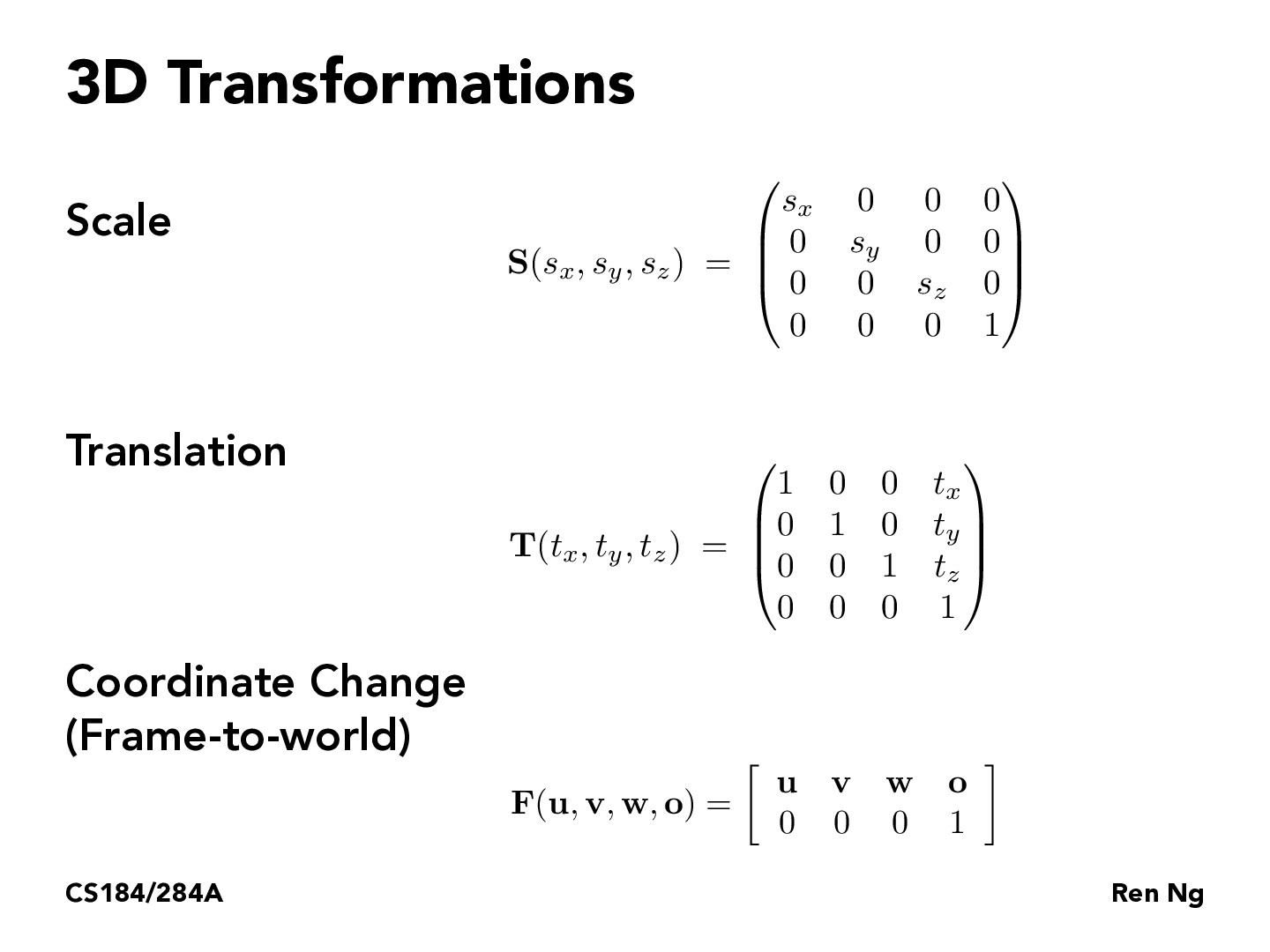
Professor Ng mentioned making a mistake about viewing the coordinate change as world-to-frame as opposed to frame-to-world, as mentioned on this slide. Is there anyway someone can explain the proper frame-to-world view?
brandonlouie
One way I understand the frame-to-world coordinate change is similar to how we described a 2D coordinate system in slide 19. I'm going to assume we're working with the standard xyz plane that we're familiar with as our world frame. In this case, we can interpret u, v, and w as the x, y, and z axes of the new frame. However, these vectors (u, v, and w) are expressed in the coordinates of the world frame (I believe this is what's meant by "frame-to-world"; the new frame's coordinates are written in the "language" of the world frame), meaning we could plot them in our world frame and visualize where this new frame is with respects to our world frame. We could also say the same for o, the origin of the new frame; the origin of the new frame is expressed in the coordinates of the world frame, thus we can plot it on our world frame to visualize it.
I hope this helps, and if I was wrong somewhere or someone has a better explanation please feel free to correct me or share your understanding!!
crispyinuo
In the matrix F(u,v,w,o), I think of u,v,and w as little directional arrows showing where the front, top, and side of my airplane point towards in the room. The o is telling where the center of airplane is on the map.
Professor Ng mentioned making a mistake about viewing the coordinate change as world-to-frame as opposed to frame-to-world, as mentioned on this slide. Is there anyway someone can explain the proper frame-to-world view?
One way I understand the frame-to-world coordinate change is similar to how we described a 2D coordinate system in slide 19. I'm going to assume we're working with the standard xyz plane that we're familiar with as our world frame. In this case, we can interpret u, v, and w as the x, y, and z axes of the new frame. However, these vectors (u, v, and w) are expressed in the coordinates of the world frame (I believe this is what's meant by "frame-to-world"; the new frame's coordinates are written in the "language" of the world frame), meaning we could plot them in our world frame and visualize where this new frame is with respects to our world frame. We could also say the same for o, the origin of the new frame; the origin of the new frame is expressed in the coordinates of the world frame, thus we can plot it on our world frame to visualize it.
I hope this helps, and if I was wrong somewhere or someone has a better explanation please feel free to correct me or share your understanding!!
In the matrix F(u,v,w,o), I think of u,v,and w as little directional arrows showing where the front, top, and side of my airplane point towards in the room. The o is telling where the center of airplane is on the map.