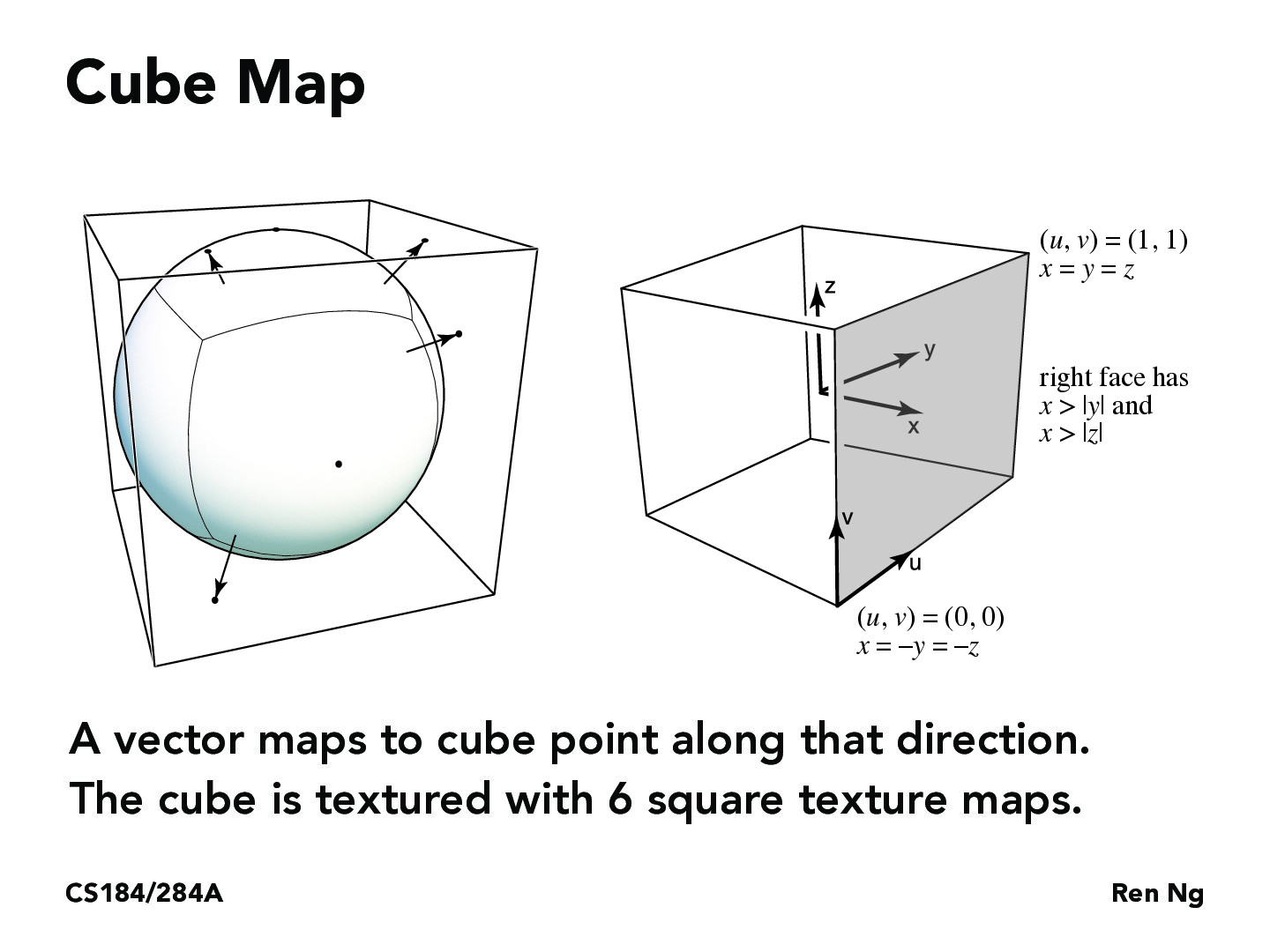
I wanted to look more into sphere and cube maps, since I was a little confused on the differences between how they worked. Firstly, sphere and cube maps differ in the amount of image processing needed to create them. Creating a sphere map involves projecting and wrapping an image around a sphere, while a cube map consists of six images projected onto each side of a cube. Sphere maps therefore take a greater degree of image processing to formulate and are usually more distorted, especially around the poles. However, because there’s only a single image to index through, look-ups tend to be faster than in cube maps, which have the index through six images. Textures from cube maps might also feature seams where the edges of the image were split. Cube maps also capture the whole camera space, whereas whatever a sphere map captures is dependent on the camera’s position and orientation. I think that going through these differences helped me in understanding this concept.
j-nn
From what I understand, the steps for how cube mapping works is that you take the pixels and then use the 2d direction vector to show where the lighting would point (NWES). Then, you are to do the texture sampling and the interpolation. I could how this is very useful in gaming and other things as well.
grafour
I think a good intuition is to think of 3d paper models. How every 3d paper model can be flattened like a cardboard box, and then it can be mapped to its cube map coordinates.
jerrymby
I understand the cube representation of the how the data is stored, but my question is why it must be a cube? If we are casting a vector direction to figure out color, why can't we just store that information directly?
I wanted to look more into sphere and cube maps, since I was a little confused on the differences between how they worked. Firstly, sphere and cube maps differ in the amount of image processing needed to create them. Creating a sphere map involves projecting and wrapping an image around a sphere, while a cube map consists of six images projected onto each side of a cube. Sphere maps therefore take a greater degree of image processing to formulate and are usually more distorted, especially around the poles. However, because there’s only a single image to index through, look-ups tend to be faster than in cube maps, which have the index through six images. Textures from cube maps might also feature seams where the edges of the image were split. Cube maps also capture the whole camera space, whereas whatever a sphere map captures is dependent on the camera’s position and orientation. I think that going through these differences helped me in understanding this concept.
From what I understand, the steps for how cube mapping works is that you take the pixels and then use the 2d direction vector to show where the lighting would point (NWES). Then, you are to do the texture sampling and the interpolation. I could how this is very useful in gaming and other things as well.
I think a good intuition is to think of 3d paper models. How every 3d paper model can be flattened like a cardboard box, and then it can be mapped to its cube map coordinates.
I understand the cube representation of the how the data is stored, but my question is why it must be a cube? If we are casting a vector direction to figure out color, why can't we just store that information directly?