Lecture 9: Ray Tracing & Acceleration Structures (40)
joyjwlee
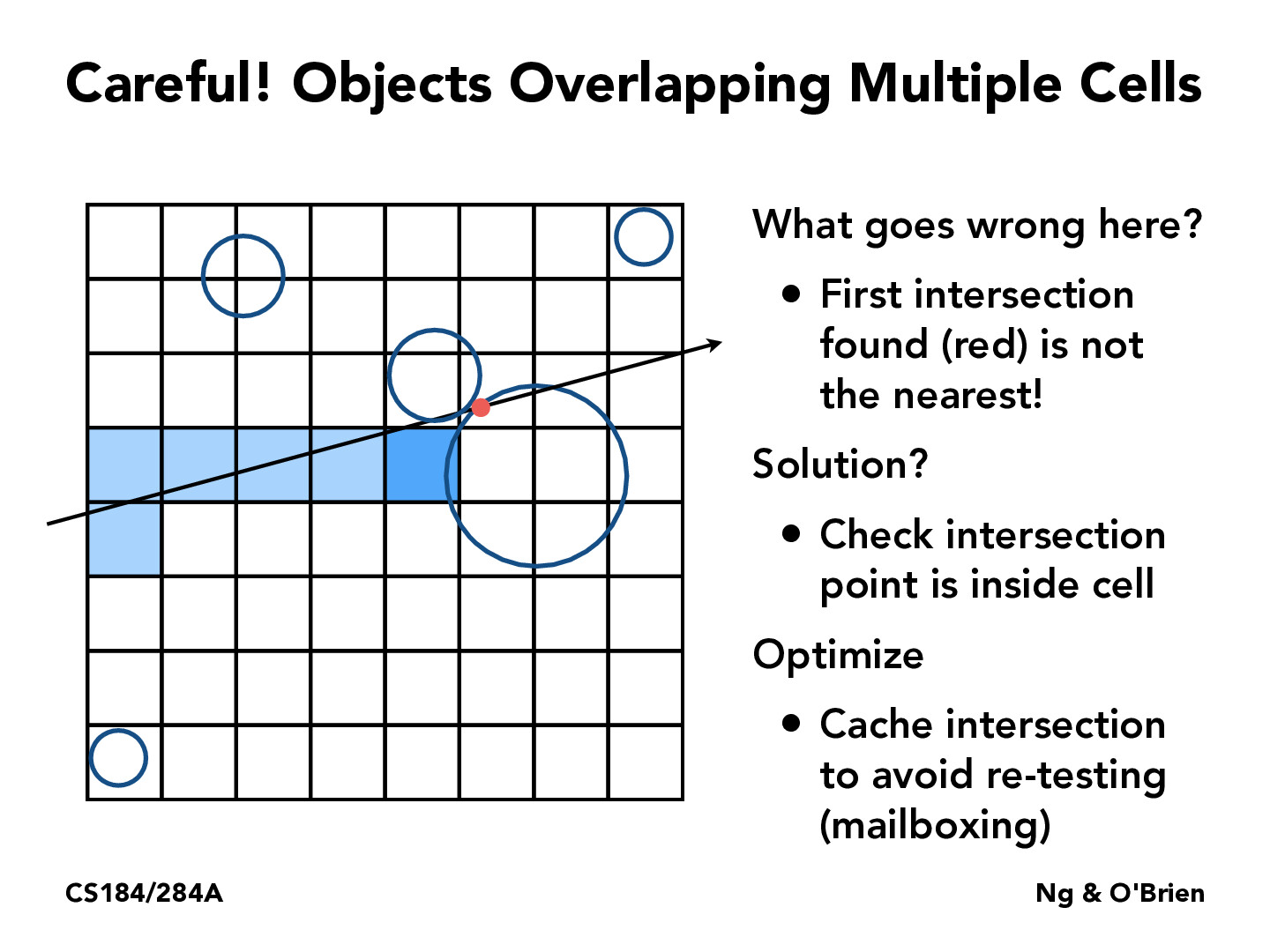
Here is my understanding of why this optimization is faulty:
we traverse along the grid
the dark blue box is where we first see something "interesting" -- i.e. a circle
we calculate the intersection based on what we saw in the blue box and the circle
the intersection we calculated, the red dot, is NOT the nearest
instead, the intersection calculation should be done in the next grid we'd move to -- the fix for this is as on the slides, checking if the intersection point is in our current cell
andreisito
I'm still a little confused about this edge case. Does our algorithm look for collisions of bounding boxes within the grid first, then just looks at that box of interest afterwards? Why isn't there a grid collision with that nearer, closer bounding volume? Wouldn't that stop us from incorrectly marking that red part as the nearest?
Here is my understanding of why this optimization is faulty:
I'm still a little confused about this edge case. Does our algorithm look for collisions of bounding boxes within the grid first, then just looks at that box of interest afterwards? Why isn't there a grid collision with that nearer, closer bounding volume? Wouldn't that stop us from incorrectly marking that red part as the nearest?