Lecture 9: Ray Tracing & Acceleration Structures (48)
aidangarde
Is there an equation for optimality with this, beyond just simulating and testing performance? I wonder if there are patterns that are generally more efficient than others. How efficient is it to partially change hierarchies during processing to optimize.
rcorona
In practice are the entire bounds of the scene always included in spatial hierarchy creation?
I'm thinking of cases where one could guarantee that certain regions of the scene are completely occluded during a rendering time-step, e.g. when the scene includes a house and a garden and the camera is a room with no view of the outside.
If one can guarantee that certain regions of a scene will not contribute light to the camera, I imagine explicitly excluding them from the hierarchy could yield large savings in compute cost.
s3kim2018
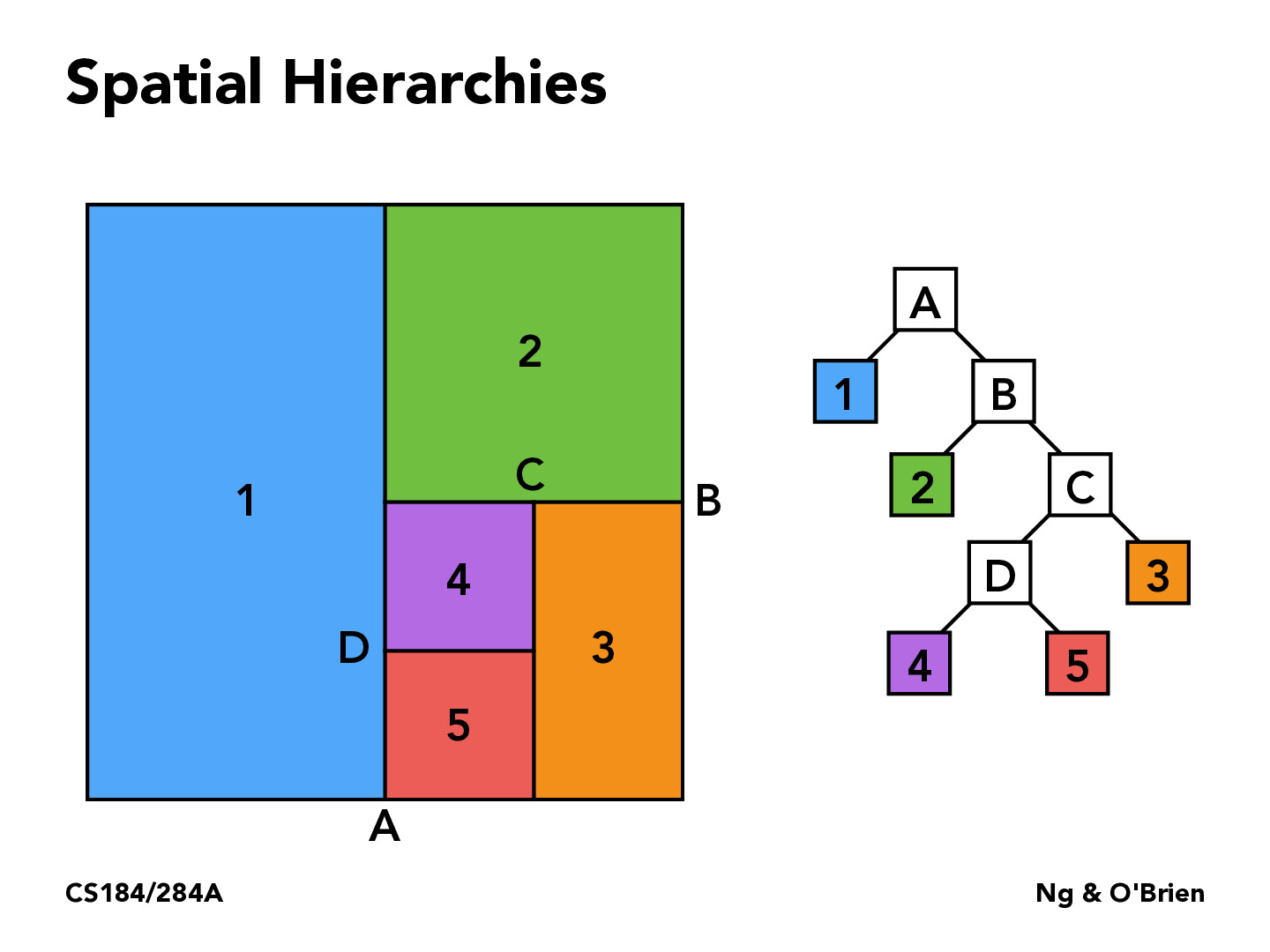
The examples in the slide show a right deep tree. I think this will be inefficient as for the left leaf, we would have to check if rays intersect with any triangles in area 1. Area 1 has a large bounding box, and all lays landing in that bounding box will have to check for triangle intersections. Is there a possibly better scheme to divide up the rectangle?
JunoLee128
How/do we ensure the trees are self-balancing? Or alternatively, if there are many triangles per scene (order of millions/billions?), would it not matter due to the probability of unbalanced trees being low?
Is there an equation for optimality with this, beyond just simulating and testing performance? I wonder if there are patterns that are generally more efficient than others. How efficient is it to partially change hierarchies during processing to optimize.
In practice are the entire bounds of the scene always included in spatial hierarchy creation?
I'm thinking of cases where one could guarantee that certain regions of the scene are completely occluded during a rendering time-step, e.g. when the scene includes a house and a garden and the camera is a room with no view of the outside.
If one can guarantee that certain regions of a scene will not contribute light to the camera, I imagine explicitly excluding them from the hierarchy could yield large savings in compute cost.
The examples in the slide show a right deep tree. I think this will be inefficient as for the left leaf, we would have to check if rays intersect with any triangles in area 1. Area 1 has a large bounding box, and all lays landing in that bounding box will have to check for triangle intersections. Is there a possibly better scheme to divide up the rectangle?
How/do we ensure the trees are self-balancing? Or alternatively, if there are many triangles per scene (order of millions/billions?), would it not matter due to the probability of unbalanced trees being low?