An interpretation of this would be:
Pick your rotation around ONE axis
You will affect two of the three axes
Rotation about a 2D space, keep other one constant
In short, you are working to rotate utilizing two axes at a time (mini-proof is notice the columns with the 1s and the 2D rotation like elements in the matrix)
Staffyirenng
@ochan1 -- thank you!
Staffyirenng
For Ry(α), where would the red arrow go? And how about for Rz(α). Why does the top-right sin(α) in the second matrix lack a negative sign?
rollororo
To rotate in an even greater dimension, would we just follow the same patterns of these rotation matrices and also add rotation matrices for the extra dimensions?
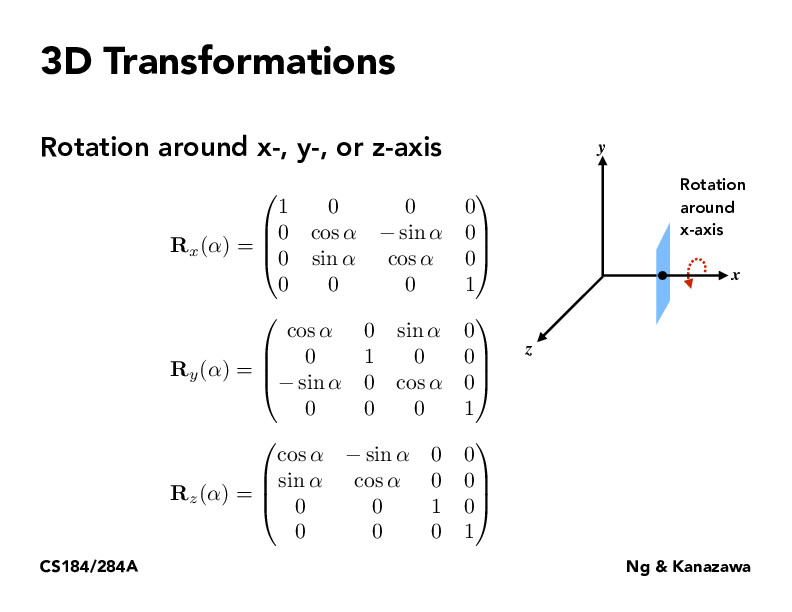
An interpretation of this would be: Pick your rotation around ONE axis
You will affect two of the three axes
Rotation about a 2D space, keep other one constant
In short, you are working to rotate utilizing two axes at a time (mini-proof is notice the columns with the 1s and the 2D rotation like elements in the matrix)
@ochan1 -- thank you!
For Ry(α), where would the red arrow go? And how about for Rz(α). Why does the top-right sin(α) in the second matrix lack a negative sign?
To rotate in an even greater dimension, would we just follow the same patterns of these rotation matrices and also add rotation matrices for the extra dimensions?