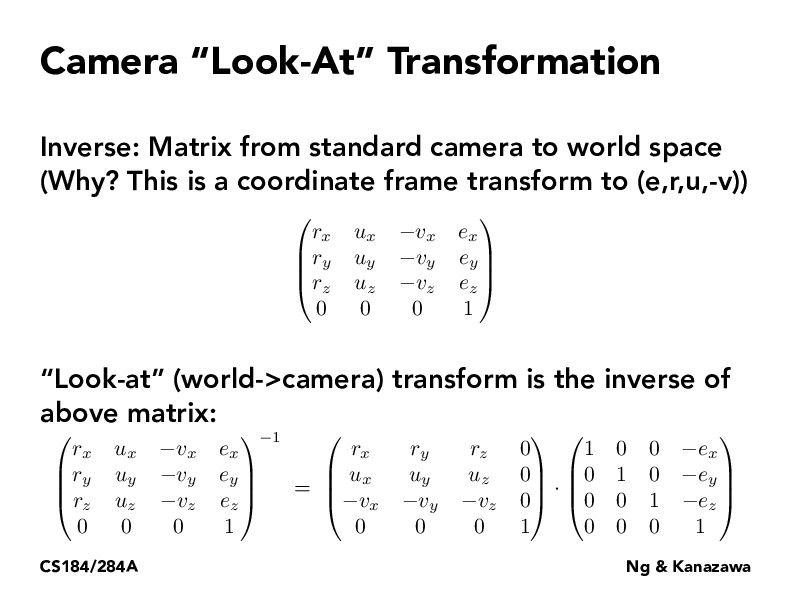
Similar to coordinate system transform, columns of the top matrix represent coordinates of e,u,r,v (axis and origin of camera space) in world space coord system, and it transforms coordinate of a point in camera space coord system to coordinate of the same point in world space coord system.
ziyicui2022
The world to camera transform matrix can be expanded as the product of two matrix, which can be interpreted as a first translation (align origin) and then a ratation (align axes).
Why do we use -v instead of v here?
Similar to coordinate system transform, columns of the top matrix represent coordinates of e,u,r,v (axis and origin of camera space) in world space coord system, and it transforms coordinate of a point in camera space coord system to coordinate of the same point in world space coord system.
The world to camera transform matrix can be expanded as the product of two matrix, which can be interpreted as a first translation (align origin) and then a ratation (align axes).