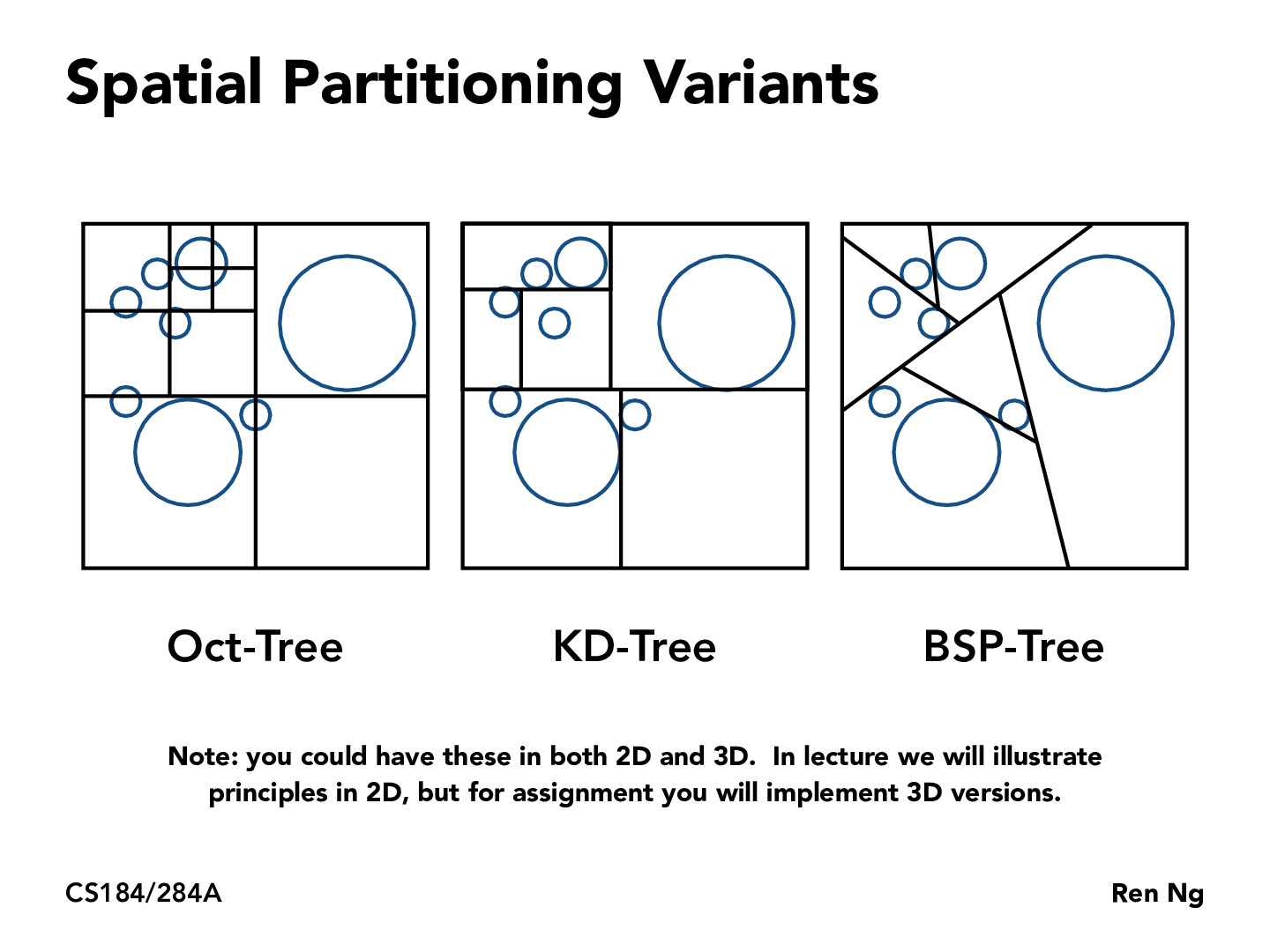
What are the tradeoffs between these spatial partitioning variants and is there one that is generally preferred over the others (e.g. KD-Tree, as is expanded on in more detail?)
somaniarushi
Which form of partitioning is typically used in industry? Are the different partition variants preferred in different scenarios and based on different needs? Just curious about when we'd use a KD-Tree versus Oct-Tree versus BSP-Tree
joshua16266261
I'm not sure, but I feel like KD-Tree vs. BSP-Tree is kind of like axis-aligned vs. non-axis-aligned bounding boxes, where being axis-aligned allows us to save on the number of elementary operations needed to perform an intersection test, but it might not be as well-fitted to the objects in the scene.
StephenYangjz
I find these different variants of the partitioning schemes interesting. Personally, I worked with the Octree package as a way to efficiently store lidar point cloud information before, and it's not surprising that it also can be used here. However, I wonder how do we know which one works better in a specific scenario? Also, does the algorithm we discussed for KD-tree work for octree? Because I guess we can not arbitrarily draw the line for octree, does it mean that the algorithm will be different?
greeknerd1
Which of these types of trees are used in practice? Or is it dependent on the specific problem itself?
What are the tradeoffs between these spatial partitioning variants and is there one that is generally preferred over the others (e.g. KD-Tree, as is expanded on in more detail?)
Which form of partitioning is typically used in industry? Are the different partition variants preferred in different scenarios and based on different needs? Just curious about when we'd use a KD-Tree versus Oct-Tree versus BSP-Tree
I'm not sure, but I feel like KD-Tree vs. BSP-Tree is kind of like axis-aligned vs. non-axis-aligned bounding boxes, where being axis-aligned allows us to save on the number of elementary operations needed to perform an intersection test, but it might not be as well-fitted to the objects in the scene.
I find these different variants of the partitioning schemes interesting. Personally, I worked with the Octree package as a way to efficiently store lidar point cloud information before, and it's not surprising that it also can be used here. However, I wonder how do we know which one works better in a specific scenario? Also, does the algorithm we discussed for KD-tree work for octree? Because I guess we can not arbitrarily draw the line for octree, does it mean that the algorithm will be different?
Which of these types of trees are used in practice? Or is it dependent on the specific problem itself?