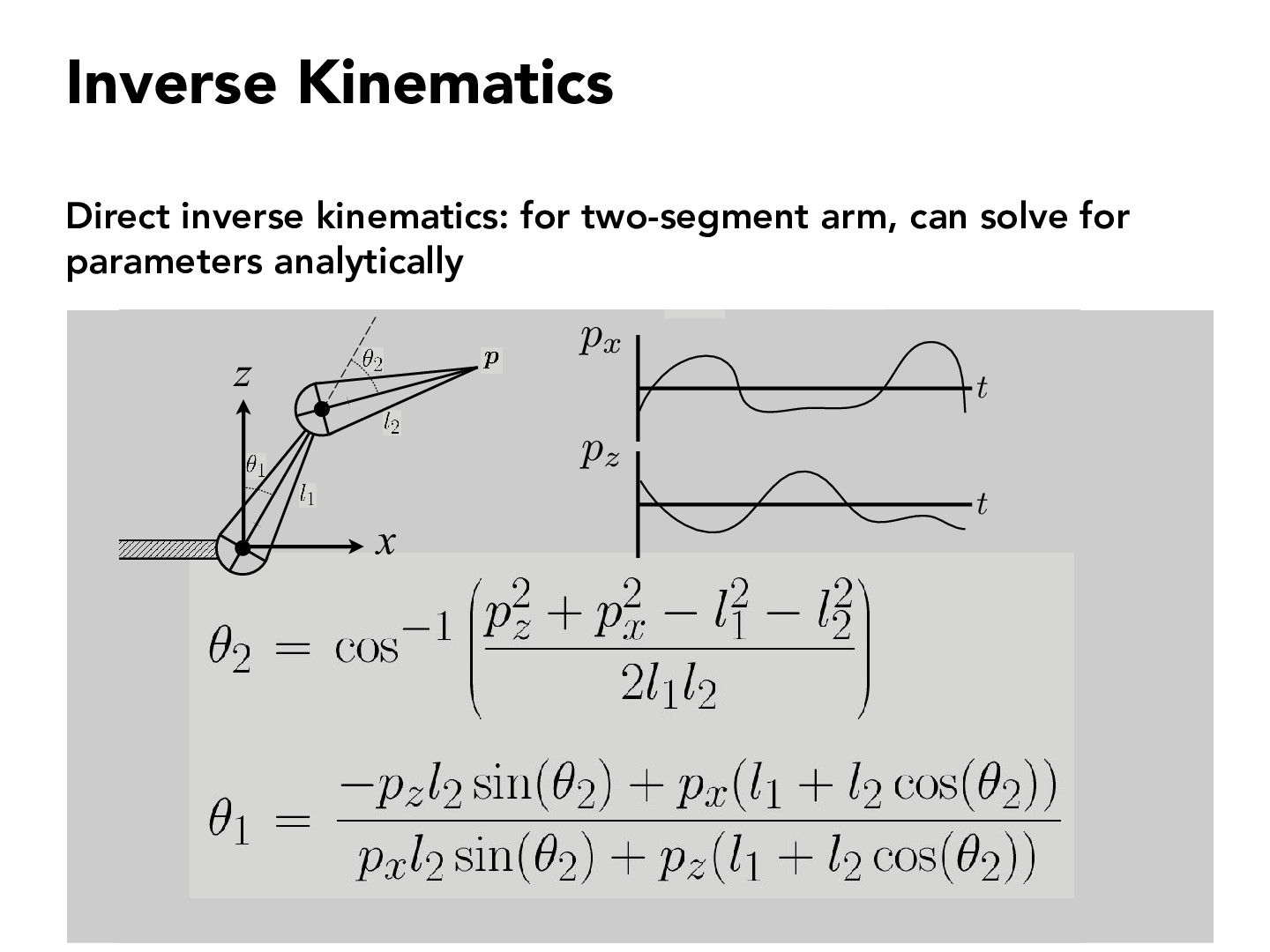
These equations seem fairly complicated, especially the one for theta 1, since it's dependent on theta 2. Does this take a lot of computational overhead when calculating this on a processor? Any tips or shortcuts to accelerate it?
ashvindhawan
^Is this something we could use the Fourier transform for, since almost everything is defined in sines and cosines?
somaniarushi
More of a meta question: Wondering if we should be understanding in depth the principles of inverse kinematics for this class!
ML2000-LT
It seemed that both theta 1 and theta 2 are predetermined by the px, pz and l1, l2, it did not seem to have any room for the different conditions, which we may simulate in the later slides. How is the instability of the inverse presented?
These equations seem fairly complicated, especially the one for theta 1, since it's dependent on theta 2. Does this take a lot of computational overhead when calculating this on a processor? Any tips or shortcuts to accelerate it?
^Is this something we could use the Fourier transform for, since almost everything is defined in sines and cosines?
More of a meta question: Wondering if we should be understanding in depth the principles of inverse kinematics for this class!
It seemed that both theta 1 and theta 2 are predetermined by the px, pz and l1, l2, it did not seem to have any room for the different conditions, which we may simulate in the later slides. How is the instability of the inverse presented?