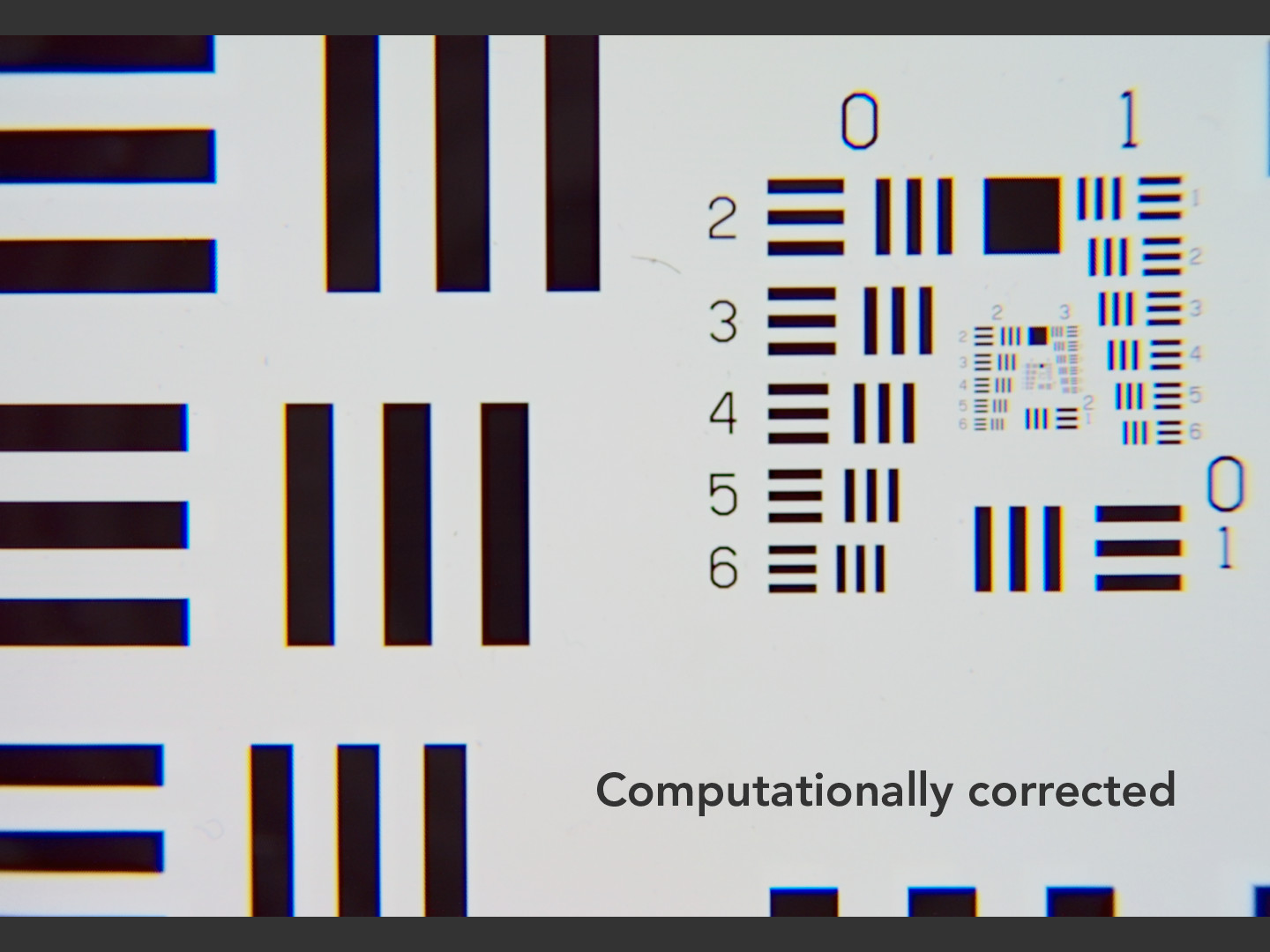
In robotics camera calibration is important to ensure vertical and horizontal lines in the real world end up truly horizontal and vertical in captured images, and it requires a lot of effort for traditional cameras. The computational correction in light field cameras looks like it achieves the same result. I wonder if there will be applications of this tech in the future for robotics.
In robotics camera calibration is important to ensure vertical and horizontal lines in the real world end up truly horizontal and vertical in captured images, and it requires a lot of effort for traditional cameras. The computational correction in light field cameras looks like it achieves the same result. I wonder if there will be applications of this tech in the future for robotics.