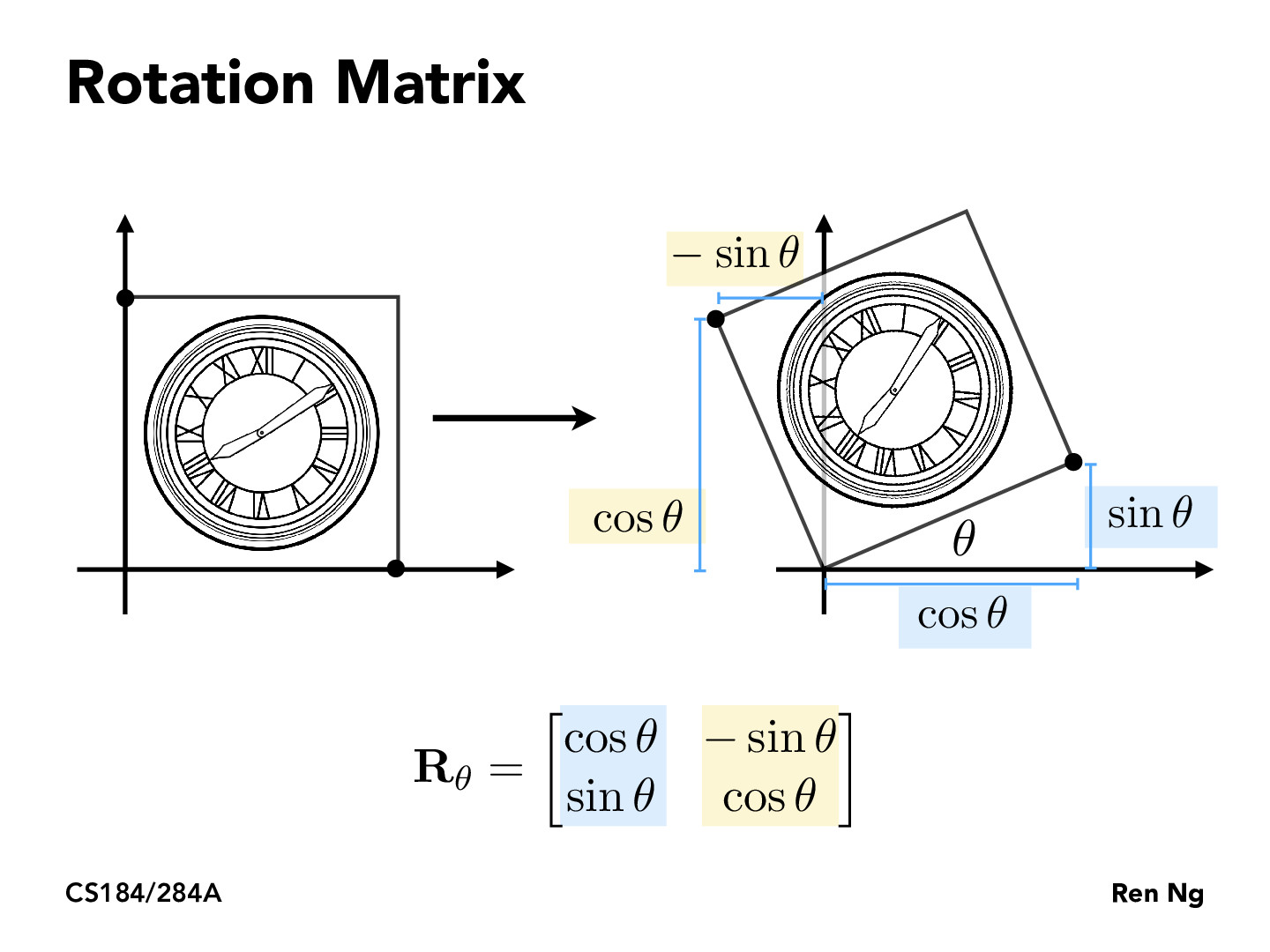
For those who are wondering how we derived this, it would be helpful to refer to the previous slide. We are basically plugging in the points (1,0) and (0,1). From the previous slide we know the resulting vector would be two columns of the transformation matrix, which are (cos, sin) and (-sin, cos).
bernardmc8
Just as an added note that I didn't see mentioned elsewhere in the slides, if you wanted to rotate it clockwise a certain angle instead, you just take the negative of both sin theta terms from the R matrix shown (effectively switching the sin theta and -sin theta terms in the R matrix). Of course, this isn't necessary as you can just rotate all the way around counterclockwise to achieve the equivalent clockwise angle you wanted.
Staffrishiu
@bernardmc8: thats a great observation! -- just to provide some background for it: think about if the clock in this slide was rotated clockwise instead of counterclockwise. The bottom right corner would be below the x-axis the same amount as its above right now and the top left corner would be to the right instead of the left. Thinking about how the coordinate axes are changed is one of the easiest ways to reason with transforms and I highly recommend you try that if you are ever confused!
For those who are wondering how we derived this, it would be helpful to refer to the previous slide. We are basically plugging in the points (1,0) and (0,1). From the previous slide we know the resulting vector would be two columns of the transformation matrix, which are (cos, sin) and (-sin, cos).
Just as an added note that I didn't see mentioned elsewhere in the slides, if you wanted to rotate it clockwise a certain angle instead, you just take the negative of both sin theta terms from the R matrix shown (effectively switching the sin theta and -sin theta terms in the R matrix). Of course, this isn't necessary as you can just rotate all the way around counterclockwise to achieve the equivalent clockwise angle you wanted.
@bernardmc8: thats a great observation! -- just to provide some background for it: think about if the clock in this slide was rotated clockwise instead of counterclockwise. The bottom right corner would be below the x-axis the same amount as its above right now and the top left corner would be to the right instead of the left. Thinking about how the coordinate axes are changed is one of the easiest ways to reason with transforms and I highly recommend you try that if you are ever confused!