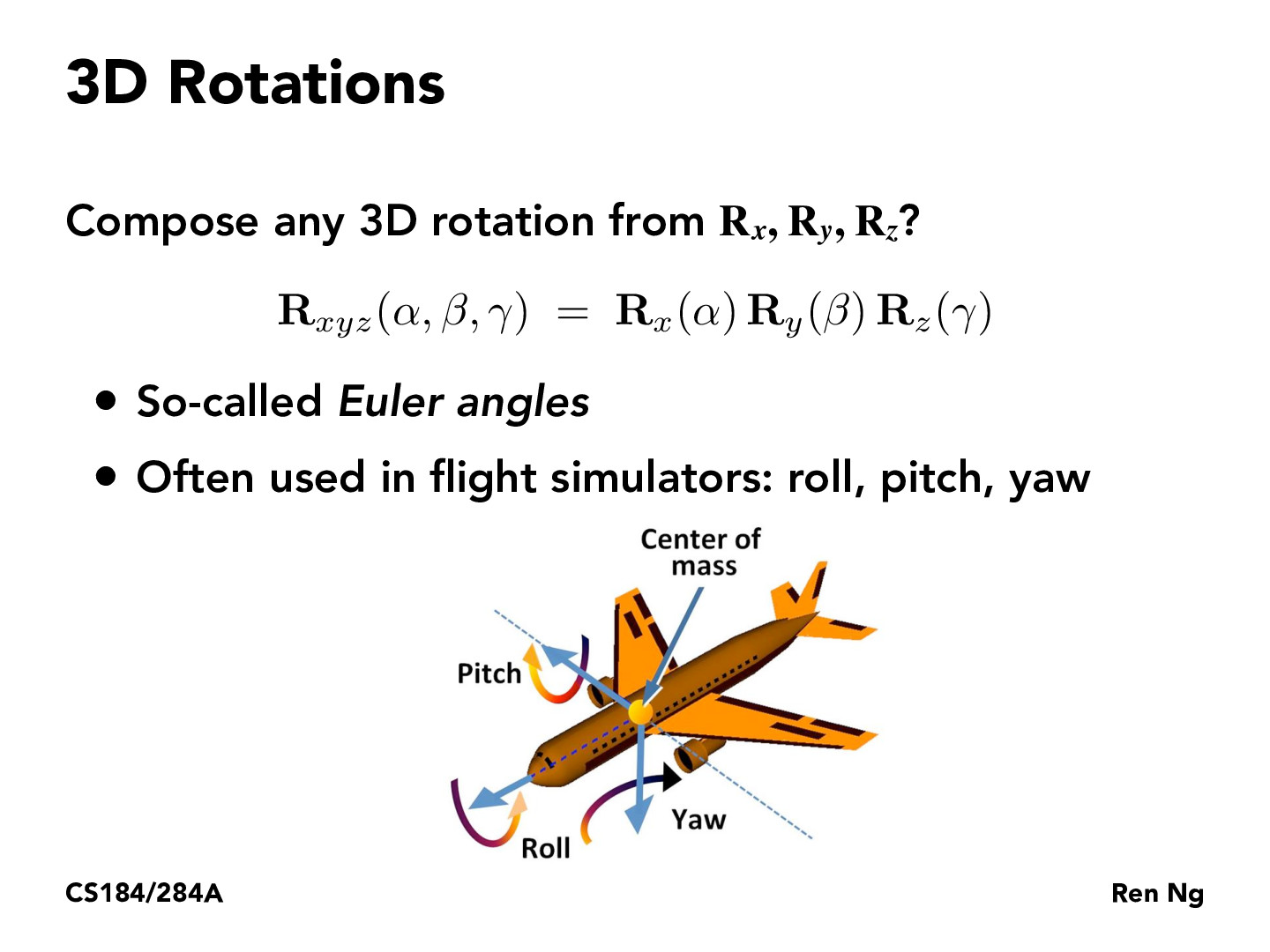
https://howthingsfly.si.edu/flight-dynamics/roll-pitch-and-yaw (this one is especially simple but has a nice explanation nonetheless)
galord8696
I wonder if there is a clean analytical solution for this triple rotation. Are the xyz transformations used often in practice? Are they used more often than the Rodrigues' formula?
dhruvswarup123
@galord8696 I believe that Euler angles are not used much because of the Gimbal Lock problem (https://www.youtube.com/watch?v=zc8b2Jo7mno). So any method of using a single rotation matrix directly, including Rodrigues formula, is preferred because now we are not decomposing them into the 3 angles. Quaternions are used to avoid this problem.
ethanweber
Some helpful articles that explain quaternions in an intuitive way. These are courtesy of a colleague.
To further the discussion on the Gimbal Lock problem, selecting large angles (for example, β=2π) can result in eliminating a degree of freedom, as seen in Slide 17 of this Autodesk presentation. Quaternions are also explained in this presentation.
For anyone interested in learning more about flight and / or flight simulators, I found the following links helpful:
https://www.linearmotiontips.com/motion-basics-how-to-define-roll-pitch-and-yaw-for-linear-systems/
https://howthingsfly.si.edu/flight-dynamics/roll-pitch-and-yaw (this one is especially simple but has a nice explanation nonetheless)
I wonder if there is a clean analytical solution for this triple rotation. Are the xyz transformations used often in practice? Are they used more often than the Rodrigues' formula?
@galord8696 I believe that Euler angles are not used much because of the Gimbal Lock problem (https://www.youtube.com/watch?v=zc8b2Jo7mno). So any method of using a single rotation matrix directly, including Rodrigues formula, is preferred because now we are not decomposing them into the 3 angles. Quaternions are used to avoid this problem.
Some helpful articles that explain quaternions in an intuitive way. These are courtesy of a colleague.
To further the discussion on the Gimbal Lock problem, selecting large angles (for example, β=2π) can result in eliminating a degree of freedom, as seen in Slide 17 of this Autodesk presentation. Quaternions are also explained in this presentation.