Lecture 8: Mesh Representations and Geometry Processing (17)
UncooleBen
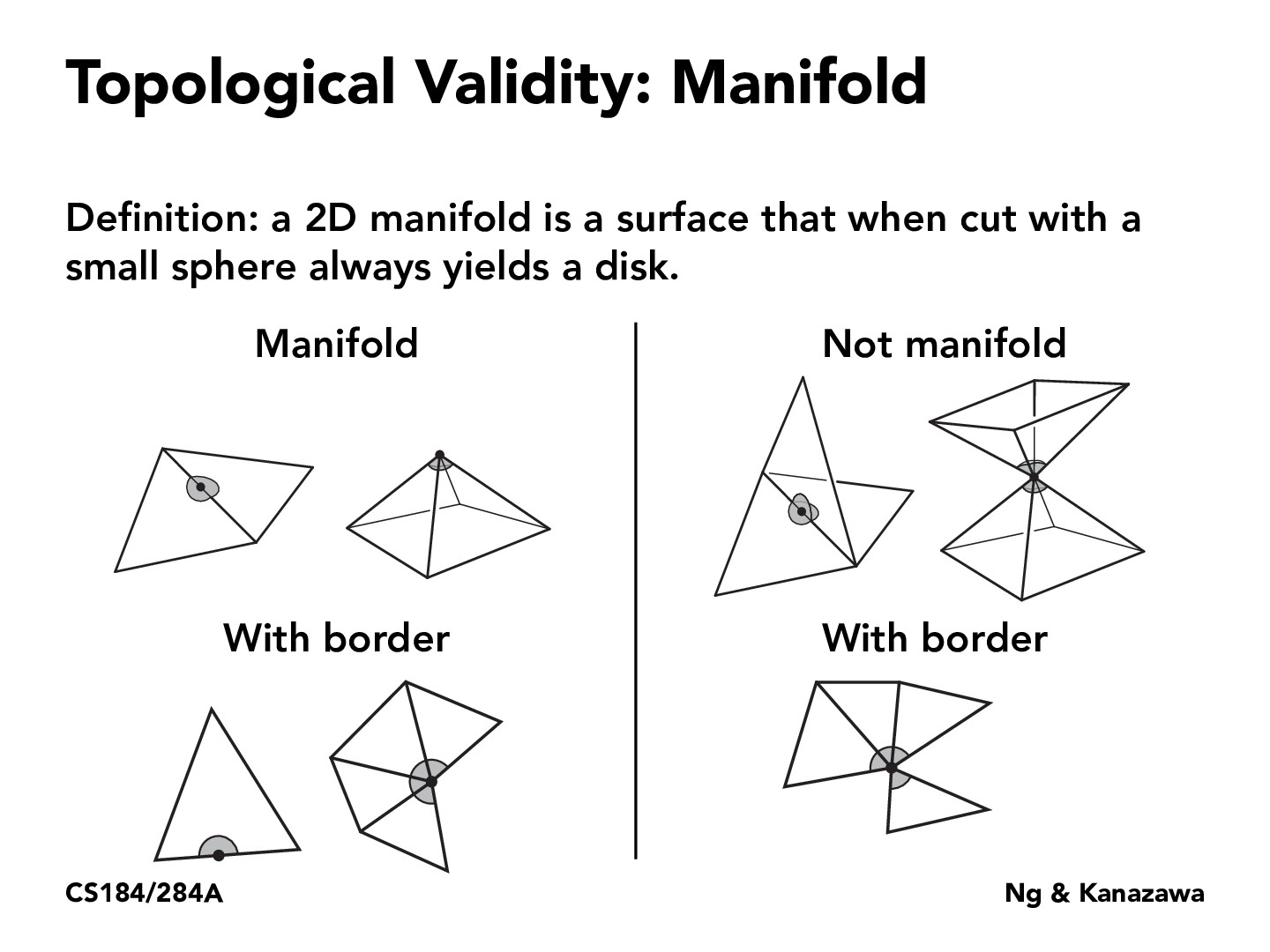
So what do we mean by disk exactly? A plane bounded by a circle, or a surface bounded by a circle?
CarneAsadaFry
@UncooleBen I believe they are referring to a disk within the manifold (so, essentially a patch of the surface bounded by a circle).
In general, the definition given here captures a lot of the intuition for typical precise definition of a (topological) manifold, but the real definition is more general and exact. The property we are trying to capture with this disk rule is called the "locally Euclidean" property of a manifold. Basically, it says that if you consider any point on the manifold, you can find some small neighborhood around it (something like a disk) with a continuous, bijective map to something like a disk in Euclidean space. By saying that we can cut any part of the manifold with a sphere and get a disk, it matches the idea wanting these neighborhoods that "look like" Euclidean space.
In the general study of manifolds, the problem with a definition like this is that we want to consider higher dimensional surfaces and generally surfaces that don't neatly live in 3D Euclidean space (or even n dimensional Euclidean space). To handle this, we add some extra conditions that we take for granted in normal 3D (Hausdorff and second countable; basically, different points in space can be separated in some way, and we don't have too large of an infinity of points) and we use the more abstract "locally Euclidean" condition to say that small disks in our manifold look like typical n-dimensional space.
So what do we mean by disk exactly? A plane bounded by a circle, or a surface bounded by a circle?
@UncooleBen I believe they are referring to a disk within the manifold (so, essentially a patch of the surface bounded by a circle).
In general, the definition given here captures a lot of the intuition for typical precise definition of a (topological) manifold, but the real definition is more general and exact. The property we are trying to capture with this disk rule is called the "locally Euclidean" property of a manifold. Basically, it says that if you consider any point on the manifold, you can find some small neighborhood around it (something like a disk) with a continuous, bijective map to something like a disk in Euclidean space. By saying that we can cut any part of the manifold with a sphere and get a disk, it matches the idea wanting these neighborhoods that "look like" Euclidean space.
In the general study of manifolds, the problem with a definition like this is that we want to consider higher dimensional surfaces and generally surfaces that don't neatly live in 3D Euclidean space (or even n dimensional Euclidean space). To handle this, we add some extra conditions that we take for granted in normal 3D (Hausdorff and second countable; basically, different points in space can be separated in some way, and we don't have too large of an infinity of points) and we use the more abstract "locally Euclidean" condition to say that small disks in our manifold look like typical n-dimensional space.