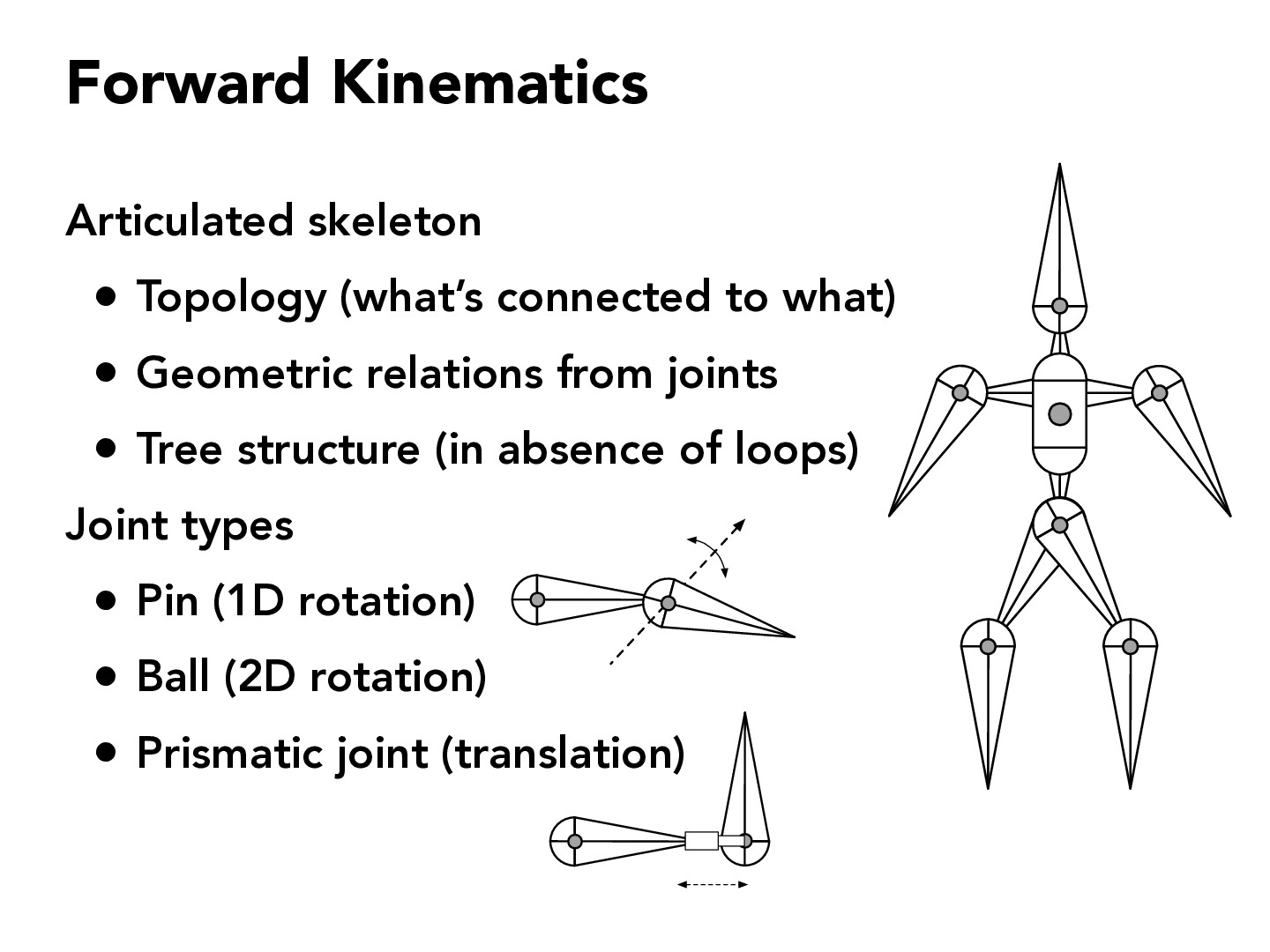
My understanding is that Forward Kinematics can be helpful with some natural scnes like waving or gesturing where we can control the hands(or whatever we want to render) through the hierarchical representation. But how can it be applied to scenes where our hands could be controlled by some more objects, say we are holding something heavy or hands are stuck by fences? How do we modify the representation so that we can express the hands in a realistic way? Or we have some better methods to accomplish this?
reinaw1012
The way I understand it is that if our hands are acted upon by an external force, we calculate the overall total force/motion (rather like our project), then simulate that total motion using the articulated skeleton and joint models. For example, if an arm is holding a heavy bag, we calculate the total force on the wrists and use forward kinematics to compute the cartesian coordinates of the wrists and hands
My understanding is that Forward Kinematics can be helpful with some natural scnes like waving or gesturing where we can control the hands(or whatever we want to render) through the hierarchical representation. But how can it be applied to scenes where our hands could be controlled by some more objects, say we are holding something heavy or hands are stuck by fences? How do we modify the representation so that we can express the hands in a realistic way? Or we have some better methods to accomplish this?
The way I understand it is that if our hands are acted upon by an external force, we calculate the overall total force/motion (rather like our project), then simulate that total motion using the articulated skeleton and joint models. For example, if an arm is holding a heavy bag, we calculate the total force on the wrists and use forward kinematics to compute the cartesian coordinates of the wrists and hands