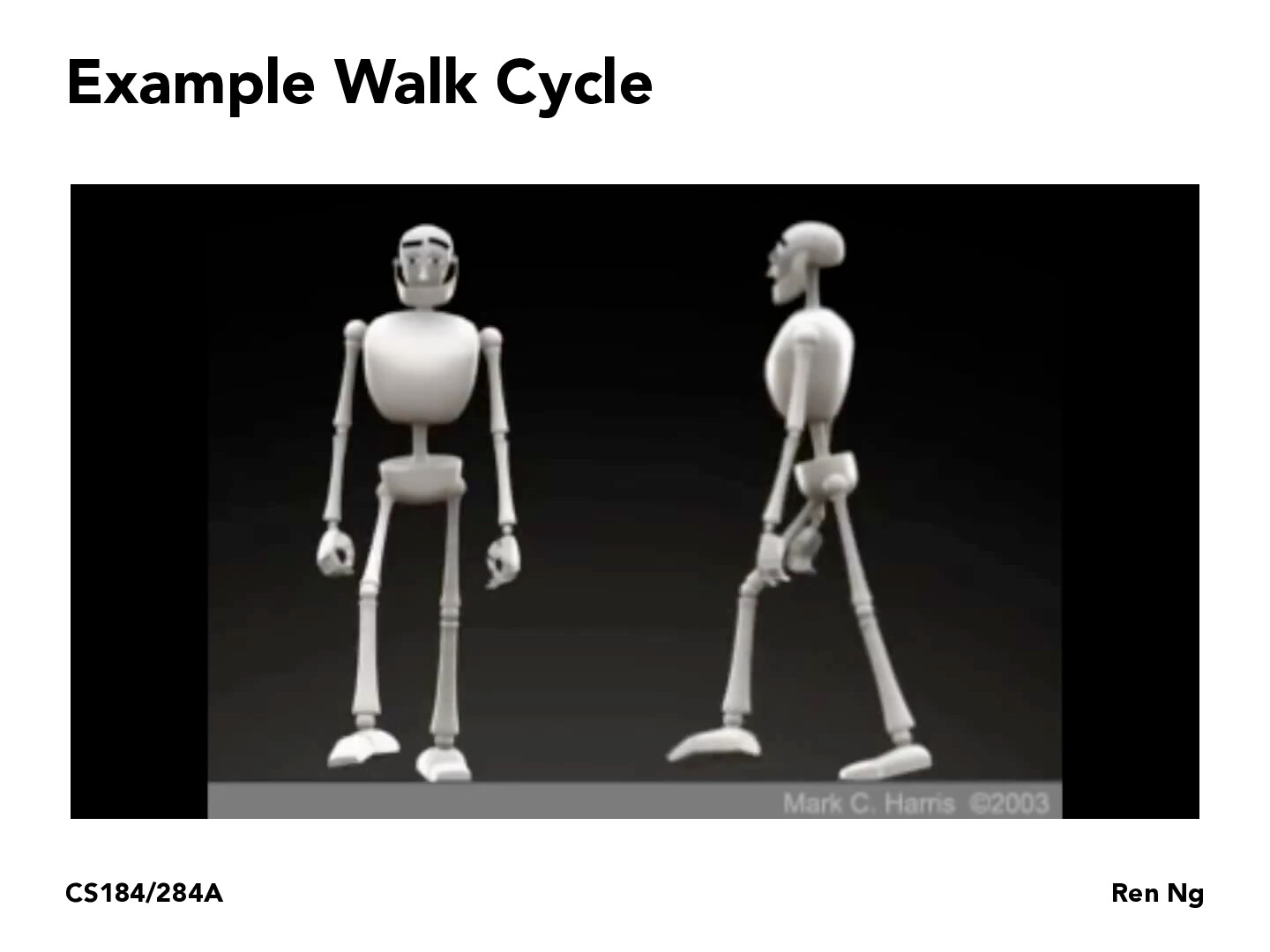
how would one go about creating a dynamic walk cycle for terrain that isn't flat? Would this be a matter of scaling the various sub elements of the animation as needed to match the difference in depth between the nominal and non-nominal terrain height.
s3kim2018
I think the walking animation through forward kinematics are supposed to be hard coded. To make the robot walk up a hill or an uneven plane, we will have to use conditionals (if foot hits surface stop and continue with next movement) or even use machine learning to teach it to walk in a more natural way.
OnceLim
Since something like walking is so commonly seen with our eyes, we tend to be more critical if the walking seems off. Same goes for human faces; when I see an animated human face and animated dog face, I would think the dog face is more accurately depicted.
how would one go about creating a dynamic walk cycle for terrain that isn't flat? Would this be a matter of scaling the various sub elements of the animation as needed to match the difference in depth between the nominal and non-nominal terrain height.
I think the walking animation through forward kinematics are supposed to be hard coded. To make the robot walk up a hill or an uneven plane, we will have to use conditionals (if foot hits surface stop and continue with next movement) or even use machine learning to teach it to walk in a more natural way.
Since something like walking is so commonly seen with our eyes, we tend to be more critical if the walking seems off. Same goes for human faces; when I see an animated human face and animated dog face, I would think the dog face is more accurately depicted.