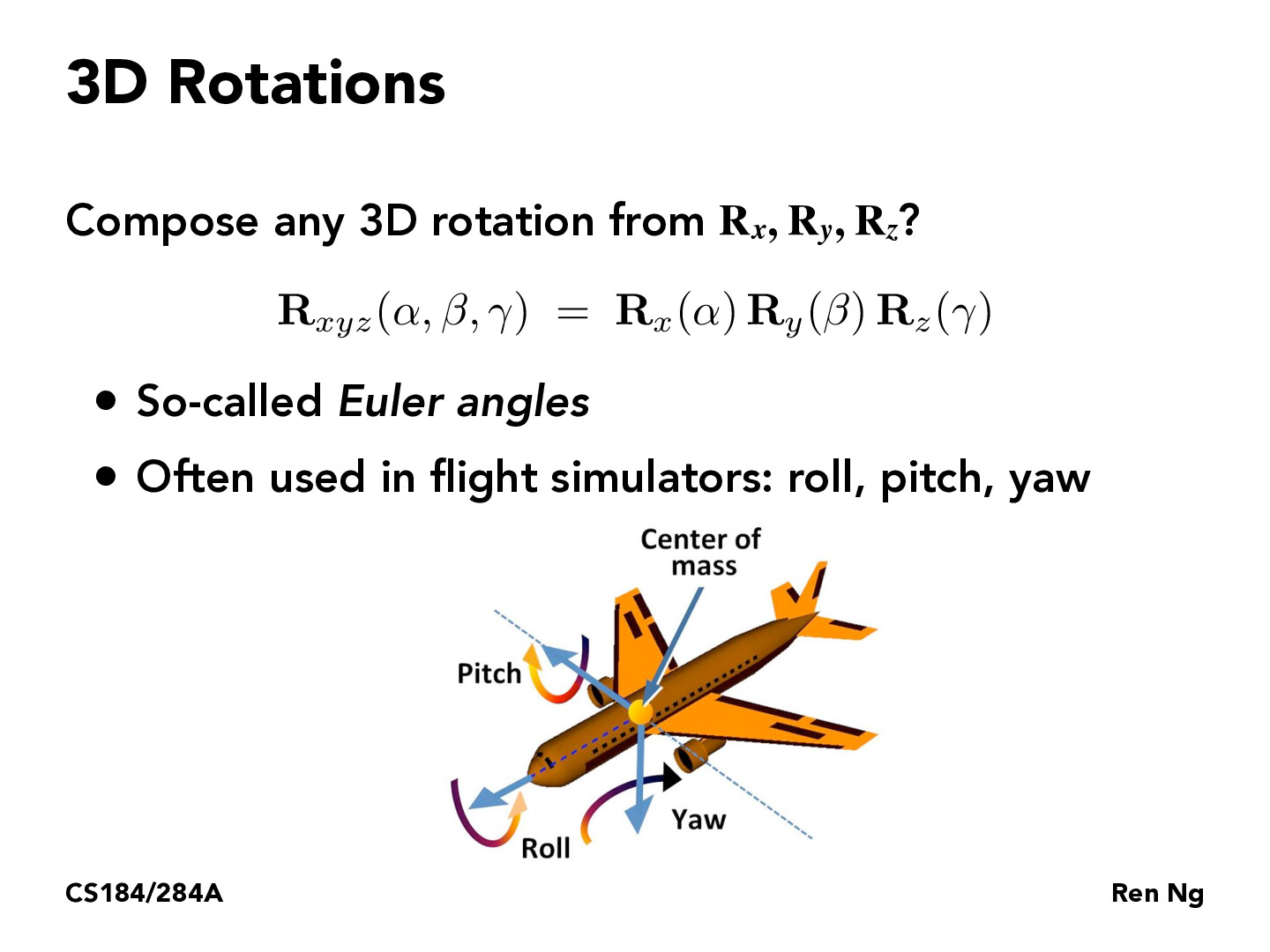
In EECS 106A, I learned that Euler angles and RPY angles are separate entities, with the former being used the describe extrinsic rotations (rotations w.r.t a fixed frame) and the latter being used to describe intrinsic rotations (rotations w.r.t to the rotating coordinate frame). In this class, we going to treat these terms as synonymous? If so, will these terms be used to describe intrinsic rotations or extrinsic rotations?
AbhiAlderman
@brandonlouie I took EECS 106A as well and was also confused by this. Intuitively I want to say that we can treat them the same? Because this is a computer graphics class, we will be working entirely with the perspective of a screen in mind (computer screen, phone screen, whatever screen is used to view the graphics). So I think we can represent any rotations as with respect to a fixed frame, the frame being the perspective of the screen? When we were learning about vision in 106A we talked about the frame of the camera that was viewing the object. So to me, I believe in this class we could assume that we could view anything happening on a screen as being seen from the fixed frame perspective of the screen itself? For example, a first person video game where you can look around can also be imagined as the world moving around the fixed frame of the computer screen? So basically, any rotation could be redefined as a Euler rotation because we can use the screen as the fixed frame? I'm not sure if this entirely makes sense and would appreciate any staff input to help my thinking!
Alescontrela
I've heard of singularities in Aeronautical applications when using euler angles. I'm curious what singularities look like in graphics applications
In EECS 106A, I learned that Euler angles and RPY angles are separate entities, with the former being used the describe extrinsic rotations (rotations w.r.t a fixed frame) and the latter being used to describe intrinsic rotations (rotations w.r.t to the rotating coordinate frame). In this class, we going to treat these terms as synonymous? If so, will these terms be used to describe intrinsic rotations or extrinsic rotations?
@brandonlouie I took EECS 106A as well and was also confused by this. Intuitively I want to say that we can treat them the same? Because this is a computer graphics class, we will be working entirely with the perspective of a screen in mind (computer screen, phone screen, whatever screen is used to view the graphics). So I think we can represent any rotations as with respect to a fixed frame, the frame being the perspective of the screen? When we were learning about vision in 106A we talked about the frame of the camera that was viewing the object. So to me, I believe in this class we could assume that we could view anything happening on a screen as being seen from the fixed frame perspective of the screen itself? For example, a first person video game where you can look around can also be imagined as the world moving around the fixed frame of the computer screen? So basically, any rotation could be redefined as a Euler rotation because we can use the screen as the fixed frame? I'm not sure if this entirely makes sense and would appreciate any staff input to help my thinking!
I've heard of singularities in Aeronautical applications when using euler angles. I'm curious what singularities look like in graphics applications