Rodrigues’ rotation formula rotates a vector by an angle around an axis by first decomposing the vector into its components parallel and perpendicular to the axis. Only the perpendicular component is rotated, computed using the cross-product between the vector and axis. The parallel component changes neither magnitude nor direction. These two components are added together to obtain the rotated vector.
A helpful image of the vector geometry: https://en.wikipedia.org/wiki/File:Orthogonal_decomposition_unit_vector_rodrigues_rotation_formula.svg
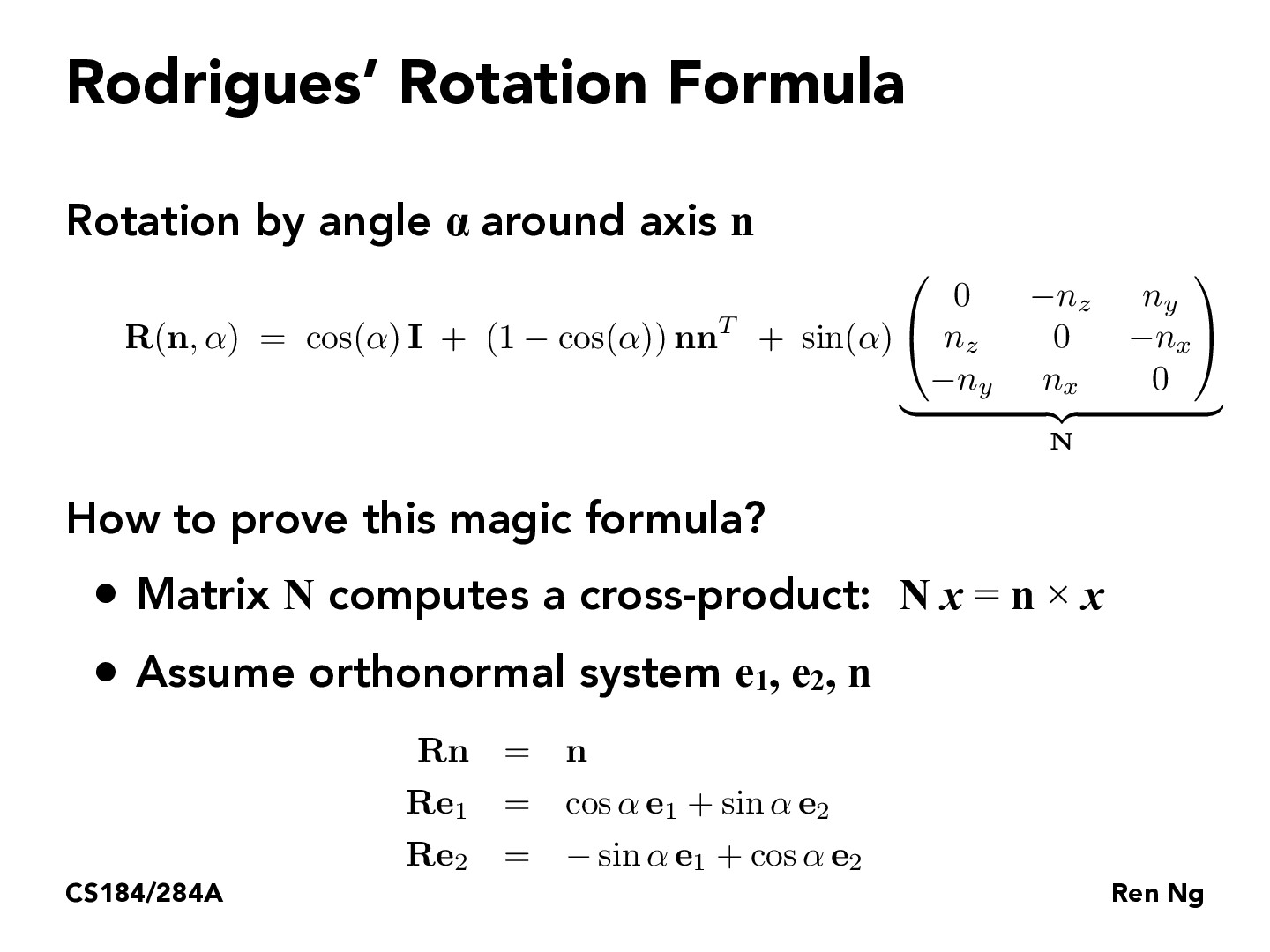
Rodrigues’ rotation formula rotates a vector by an angle around an axis by first decomposing the vector into its components parallel and perpendicular to the axis. Only the perpendicular component is rotated, computed using the cross-product between the vector and axis. The parallel component changes neither magnitude nor direction. These two components are added together to obtain the rotated vector.
A helpful image of the vector geometry: https://en.wikipedia.org/wiki/File:Orthogonal_decomposition_unit_vector_rodrigues_rotation_formula.svg