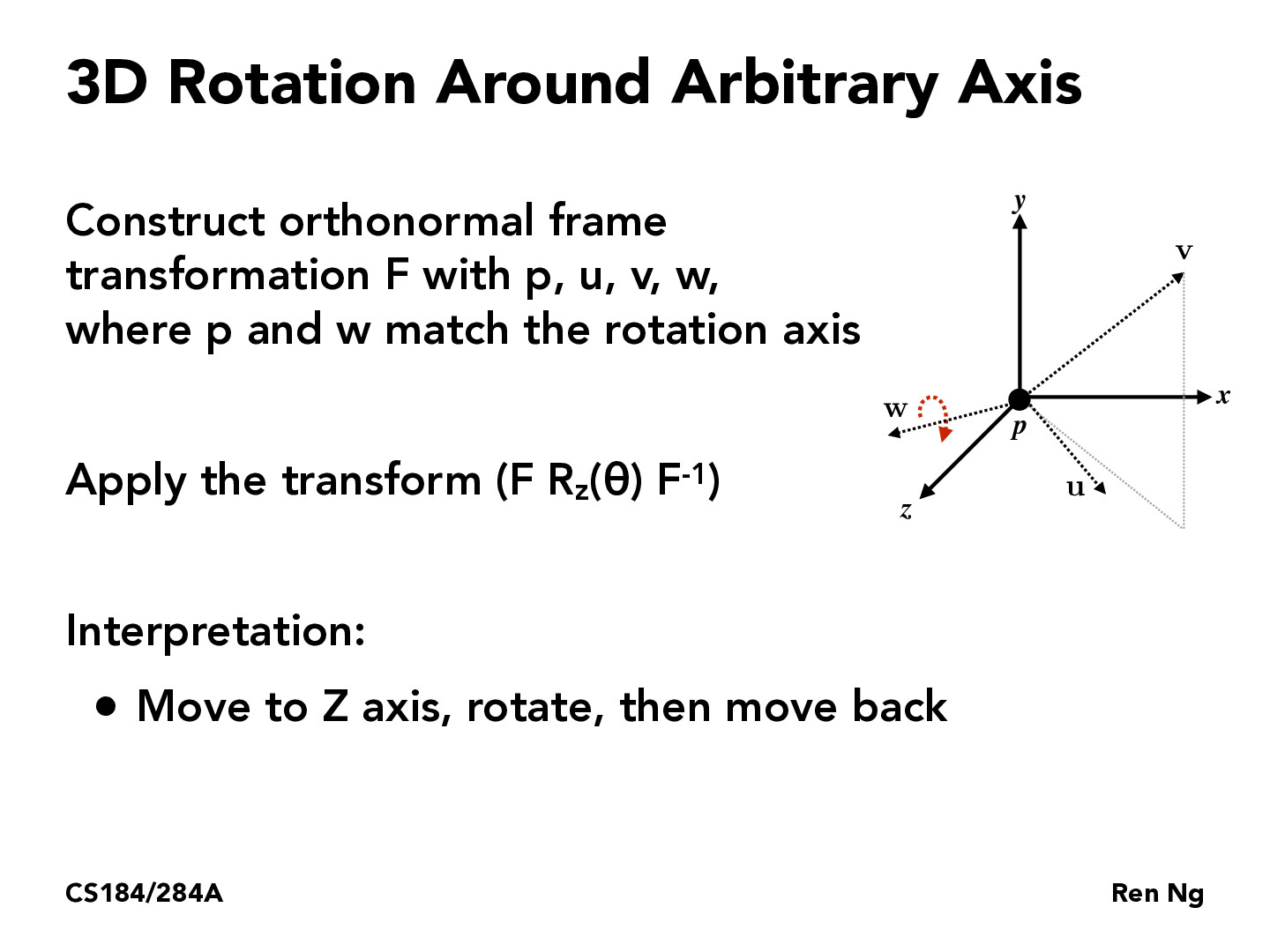
I understand how the FRz(θ)F^-1 transform rotates, but I am confused on what the orthonormal frame with p, u, v, w does, especially why p and w should "match the rotation axis". Could someone help explain this?
sebzhao
I think maybe since it's rotation around an arbitrary axis, the rotation is not necessarily around the base coordinates but the new orthonormal frame. Thus p and w determine which axis you rotate around
I understand how the FRz(θ)F^-1 transform rotates, but I am confused on what the orthonormal frame with p, u, v, w does, especially why p and w should "match the rotation axis". Could someone help explain this?
I think maybe since it's rotation around an arbitrary axis, the rotation is not necessarily around the base coordinates but the new orthonormal frame. Thus p and w determine which axis you rotate around