I wonder how these models are imagined. For example, how was the flocking model on this slide designed? Was this simply the model that most closely approximated the observed behaviour of the birds, or is the model based on some underlying scientific principles about birds?
gprechter
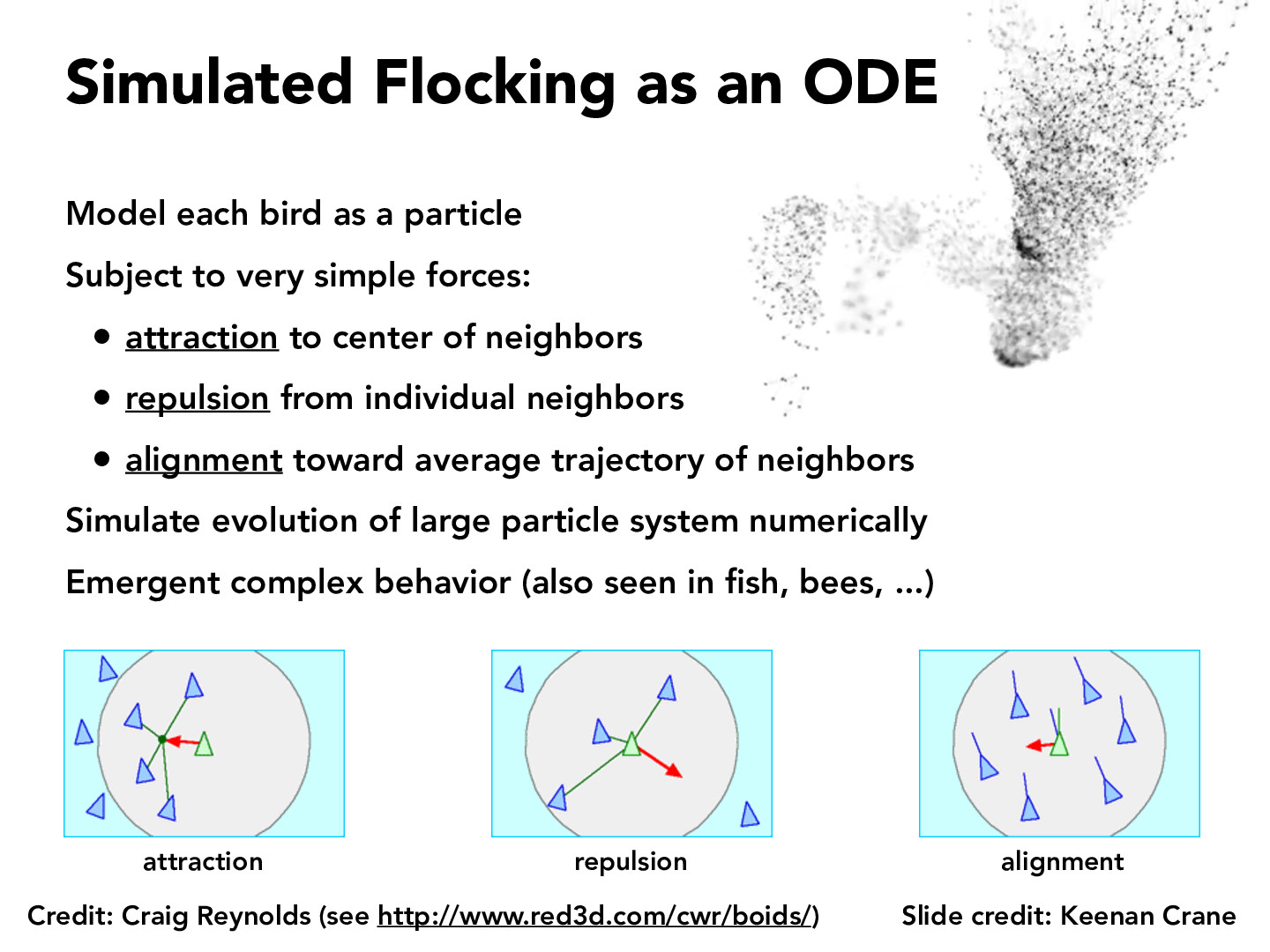
I'd guess that this behavior was modeled on the observed behavior of birds. From reading about the "boids", my impression is that each bird has its own direction and velocity, as it is flying itself, but it is influenced by the other neighboring birds based on the forces described on the slides. Like for instance i'd gather that the force of attraction comes from the observation that the birds tend to flock together in the first place; repulsion likely is related to the fact that birds don't want to collide with one another, and probably alignment is just a way that the flocks tend to be organized.
surelywang
To add onto the above comments, a bird flocking simulation was actually conducted by MIT: https://www.technologyreview.com/s/415022/first-simulation-of-the-flocking-behavior-of-starlings/
Apparently, rather than focusing on the specific behavior of each bird, the key is to focus on a set of rules that govern the flock of bird's movement as a whole -- as addressed in lecture, the behavior of neighboring birds. When simulating the behavior of each individual bird, we would take into account things like the position, movement direction, and cruising speed of its neighbors.
CptTeddy
It's surprising to see that even biological behaviors can be modeled with some simple math constraints. I wonder if a flock of birds had a purposeful direction of movement despite every single bird obeying the described rules, can we / how can we imagine a model even for that?
I wonder how these models are imagined. For example, how was the flocking model on this slide designed? Was this simply the model that most closely approximated the observed behaviour of the birds, or is the model based on some underlying scientific principles about birds?
I'd guess that this behavior was modeled on the observed behavior of birds. From reading about the "boids", my impression is that each bird has its own direction and velocity, as it is flying itself, but it is influenced by the other neighboring birds based on the forces described on the slides. Like for instance i'd gather that the force of attraction comes from the observation that the birds tend to flock together in the first place; repulsion likely is related to the fact that birds don't want to collide with one another, and probably alignment is just a way that the flocks tend to be organized.
To add onto the above comments, a bird flocking simulation was actually conducted by MIT: https://www.technologyreview.com/s/415022/first-simulation-of-the-flocking-behavior-of-starlings/
Apparently, rather than focusing on the specific behavior of each bird, the key is to focus on a set of rules that govern the flock of bird's movement as a whole -- as addressed in lecture, the behavior of neighboring birds. When simulating the behavior of each individual bird, we would take into account things like the position, movement direction, and cruising speed of its neighbors.
It's surprising to see that even biological behaviors can be modeled with some simple math constraints. I wonder if a flock of birds had a purposeful direction of movement despite every single bird obeying the described rules, can we / how can we imagine a model even for that?