How do we make sure G x f roughly integrates to 1 and preserves the magnitude of the pixels? Otherwise, it would be darker afaik
moridin22
I'm not sure if this is what you do in practice, but one solution is just to ignore that effect as you do the convolution, and then once you're finished you can calculate the average magnitude of the resulting image and scale it to match the original image.
fywu85
Another plausible solution is to first double the magnitude of the pixels and then to apply the G x f filter, which will half the intensity, bring every pixel back to its original level of intensity.
kevinliu64
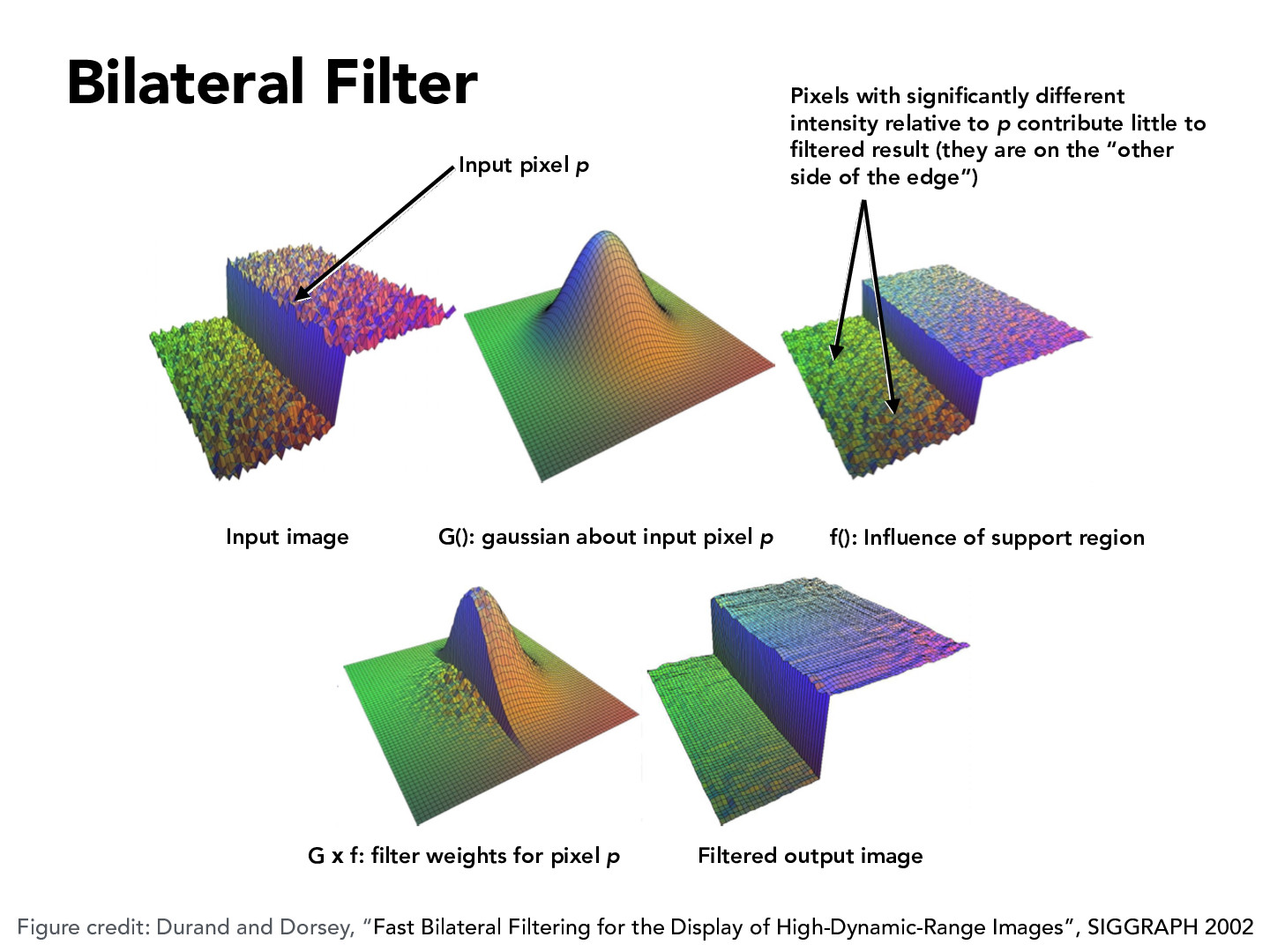
This slide provides a great representation of how the bilateral filter works since we are applying a 'weight' to each element in the kernel based on its 'intensity' and from this we can remove noise while also preserving edges.
JerryJiehanWang
Does this slide show that the points on the left contribute less when filtering, while the points on the right contribute more?
How do we make sure G x f roughly integrates to 1 and preserves the magnitude of the pixels? Otherwise, it would be darker afaik
I'm not sure if this is what you do in practice, but one solution is just to ignore that effect as you do the convolution, and then once you're finished you can calculate the average magnitude of the resulting image and scale it to match the original image.
Another plausible solution is to first double the magnitude of the pixels and then to apply the G x f filter, which will half the intensity, bring every pixel back to its original level of intensity.
This slide provides a great representation of how the bilateral filter works since we are applying a 'weight' to each element in the kernel based on its 'intensity' and from this we can remove noise while also preserving edges.
Does this slide show that the points on the left contribute less when filtering, while the points on the right contribute more?