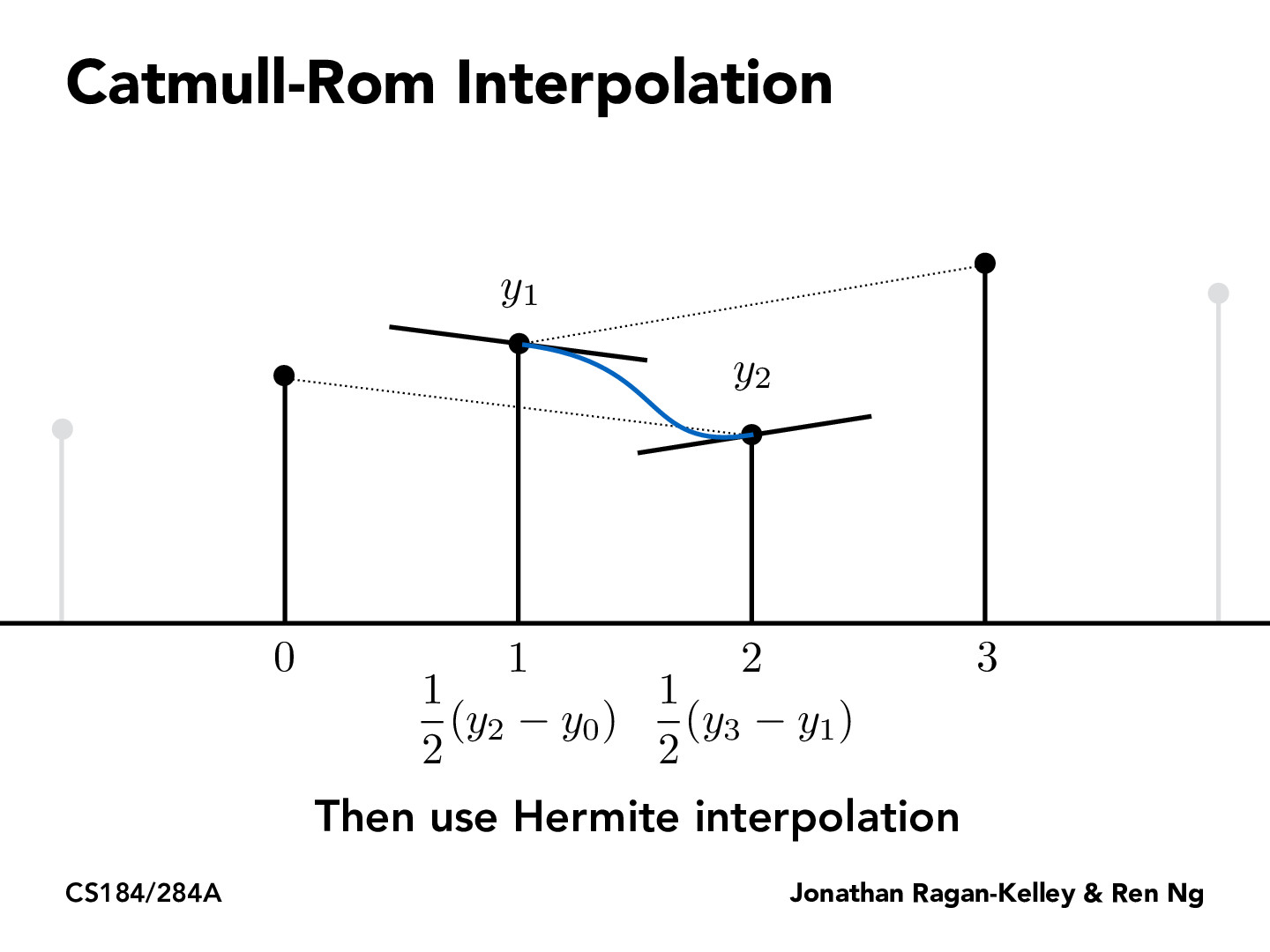
How would we calculate the splines with y0 and yn as endpoints? Do we need to approximate the derivatives somehow? I believe the professor mentioned that the function is undefined outside of the range [y0,
yn], so I'm confused on how we can define the first and last spline.
x-fa19
I believe that it was mentioned in lecture that Catmull-Rom is undefined at the endpoints. y0 and yn are only used to help define the slopes at y1 and y2, respectively.
yzyz
I think one nice way to extend Catmull-Rom at the endpoints is to use a quadratic instead of a cubic. By not specifying a slope at the endpoint, we are left with 3 constraints instead of 4, which can be satisfied using a quadratic. Thus we use a spline at the endpoints with the "simplest" curve.
qqqube
I saw in another reading that the 1/2 parameter is known as "tension"; it affects how sharply the curve bends at the interpolated points and can be adjusted depending on the context of implementation.
How would we calculate the splines with y0 and yn as endpoints? Do we need to approximate the derivatives somehow? I believe the professor mentioned that the function is undefined outside of the range [y0, yn], so I'm confused on how we can define the first and last spline.
I believe that it was mentioned in lecture that Catmull-Rom is undefined at the endpoints. y0 and yn are only used to help define the slopes at y1 and y2, respectively.
I think one nice way to extend Catmull-Rom at the endpoints is to use a quadratic instead of a cubic. By not specifying a slope at the endpoint, we are left with 3 constraints instead of 4, which can be satisfied using a quadratic. Thus we use a spline at the endpoints with the "simplest" curve.
I saw in another reading that the 1/2 parameter is known as "tension"; it affects how sharply the curve bends at the interpolated points and can be adjusted depending on the context of implementation.