Why does this construction magically give us the curve? Does it has anything to do with the geometry?
moridin22
I think your question will be answered a few slides ahead during next lecture!
muminovic
In real-world applications, is the standard to use cubics/4 control points as shown in lecture? Are higher order functions and more control points avoided because of increased complexity/time requirements? It seems like just using cubic interpolation with 4 control points constructs a nice curve based on the diagrams in the slides, but it's a little harder to visualize the performance difference in more complicated things like modeling 3D cars
muminovic
Oops looks like I got ahead of myself with this question and he talked about it a little later! It seems that using higher degree polynomials actually doesn't perform well because the relationship between the control points and the curve gets too complicated and unintuitive. After the supersampling section my default thought was that increasing the control points would make things better, but looking at it now it makes sense that if you have too many control points (like the one shown on the later slide with n=10), it becomes difficult to fit a curve with all limitations that each control point invokes
michaeltu1
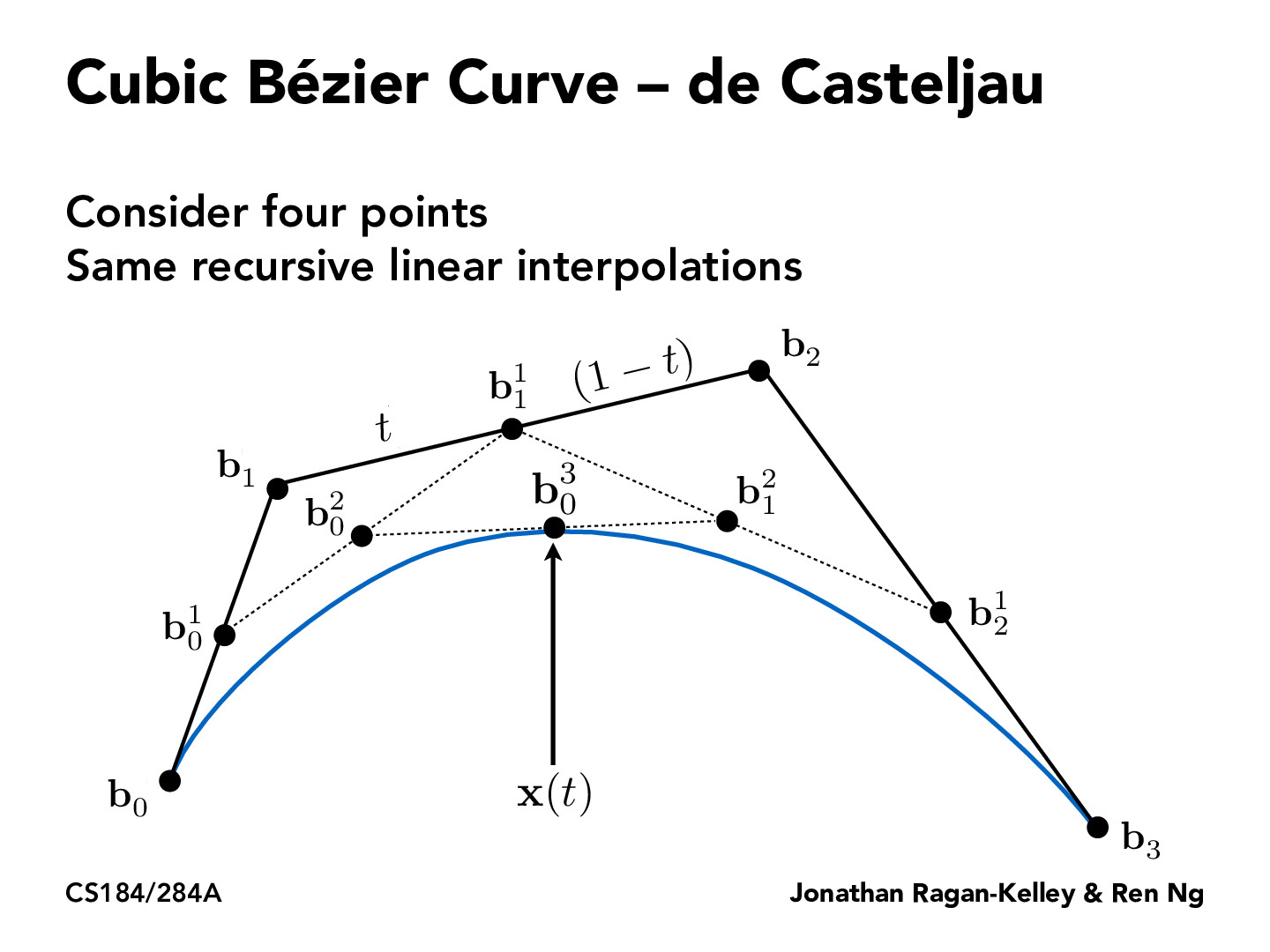
Just wanted to point out here that the variable t seems to represent time. I.e. The de Casteljau creates a function x using the given endpoints. For example, if you want to the coordinates of the point closer to b0, use a value of t less than 0.5, like x(t=0.25). If you want to the coordinates of some point on the Bezier Curve closer to endpoint b1, use a value of t greater than 0.5. I wasn't sure where t was coming from until later, so just wanted to put it out there
kevinliu64
To me it seems that the t-value directly affects how skewed the curve is towards one of the points. If we want a perfectly round curve we would want t and (1-t) to be the same value while if we want the curve to be 'heavier' on one side, we would set the t-value appropriately. The recursive implementation is also very interesting since it seems like we keep grabbing points until we're only left with one point, and it's through that point we draw the curve.
eliot1019
Even with the downsides, are there any applications for higher order Bezier Curves used in practice?
dtseng
Is there a reason why you would want to use de Casteljau's algorithm and sampling t instead of just using the closed form matrix solution? Seems like solving that would be a lot easier. For example, the matrix for the cubic case was given in one of the previous slides.
orkun1675
@dtseng I have the same question! I hope this is covered in upcoming lectures.
archshift
I think the idea is that both formulations are mathematically identical, so when you use the matrix formulation as discussed someone's comment you literally are applying de Casteljau's algorithm.
As for actually using recursive control flow to implement the procedure, I think that might just be for easy generalization to multiple dimensions given a spline of a non-predetermined # of points.
Why does this construction magically give us the curve? Does it has anything to do with the geometry?
I think your question will be answered a few slides ahead during next lecture!
In real-world applications, is the standard to use cubics/4 control points as shown in lecture? Are higher order functions and more control points avoided because of increased complexity/time requirements? It seems like just using cubic interpolation with 4 control points constructs a nice curve based on the diagrams in the slides, but it's a little harder to visualize the performance difference in more complicated things like modeling 3D cars
Oops looks like I got ahead of myself with this question and he talked about it a little later! It seems that using higher degree polynomials actually doesn't perform well because the relationship between the control points and the curve gets too complicated and unintuitive. After the supersampling section my default thought was that increasing the control points would make things better, but looking at it now it makes sense that if you have too many control points (like the one shown on the later slide with n=10), it becomes difficult to fit a curve with all limitations that each control point invokes
Just wanted to point out here that the variable t seems to represent time. I.e. The de Casteljau creates a function x using the given endpoints. For example, if you want to the coordinates of the point closer to b0, use a value of t less than 0.5, like x(t=0.25). If you want to the coordinates of some point on the Bezier Curve closer to endpoint b1, use a value of t greater than 0.5. I wasn't sure where t was coming from until later, so just wanted to put it out there
To me it seems that the t-value directly affects how skewed the curve is towards one of the points. If we want a perfectly round curve we would want t and (1-t) to be the same value while if we want the curve to be 'heavier' on one side, we would set the t-value appropriately. The recursive implementation is also very interesting since it seems like we keep grabbing points until we're only left with one point, and it's through that point we draw the curve.
Even with the downsides, are there any applications for higher order Bezier Curves used in practice?
Is there a reason why you would want to use de Casteljau's algorithm and sampling t instead of just using the closed form matrix solution? Seems like solving that would be a lot easier. For example, the matrix for the cubic case was given in one of the previous slides.
@dtseng I have the same question! I hope this is covered in upcoming lectures.
I think the idea is that both formulations are mathematically identical, so when you use the matrix formulation as discussed someone's comment you literally are applying de Casteljau's algorithm.
As for actually using recursive control flow to implement the procedure, I think that might just be for easy generalization to multiple dimensions given a spline of a non-predetermined # of points.