Lecture 19: Introduction to Character Animations (10)
wcyjames
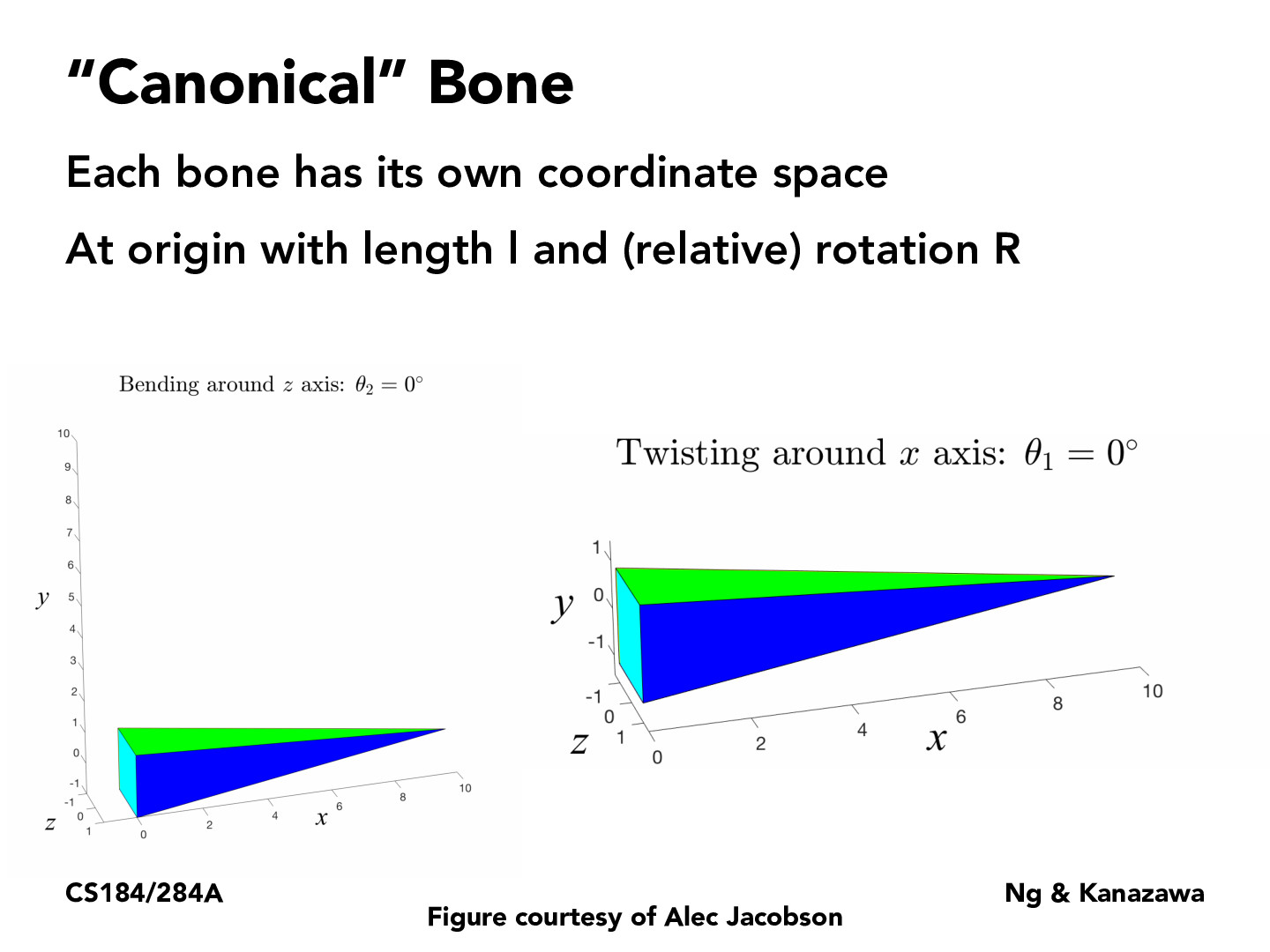
I am wondering why the bone is modeled as a tetrahedron instead of simply a rod, and what is the rationale in doing so?
yang991178
I think the reason behind this shape is that only one side of the bone can rotate and twist freely. A symmetric rod doesn't show which side is the joint.
Leon-Shao
@wcyjames I think another reason of using tetrahedron instead of a rod can be computational efficiency.
han20192019
Is it true that if I want to have a more realistic model of human moving, I should have models of more bones? But this may increase the time complexity. How do we balance between it?
pixelled
@wcyjames The bone is visually a tetrahedron but essentially modeled as a rod. I guess the reason is that a tetrahedron specifies the passive part with its skinny edge and the active joint with the other side. It's modeled as rod with only parameters length l and rotation r.
alexkassil
Another reason is bones in a line would look like one long bone if it was rod
I am wondering why the bone is modeled as a tetrahedron instead of simply a rod, and what is the rationale in doing so?
I think the reason behind this shape is that only one side of the bone can rotate and twist freely. A symmetric rod doesn't show which side is the joint.
@wcyjames I think another reason of using tetrahedron instead of a rod can be computational efficiency.
Is it true that if I want to have a more realistic model of human moving, I should have models of more bones? But this may increase the time complexity. How do we balance between it?
@wcyjames The bone is visually a tetrahedron but essentially modeled as a rod. I guess the reason is that a tetrahedron specifies the passive part with its skinny edge and the active joint with the other side. It's modeled as rod with only parameters length l and rotation r.
Another reason is bones in a line would look like one long bone if it was rod