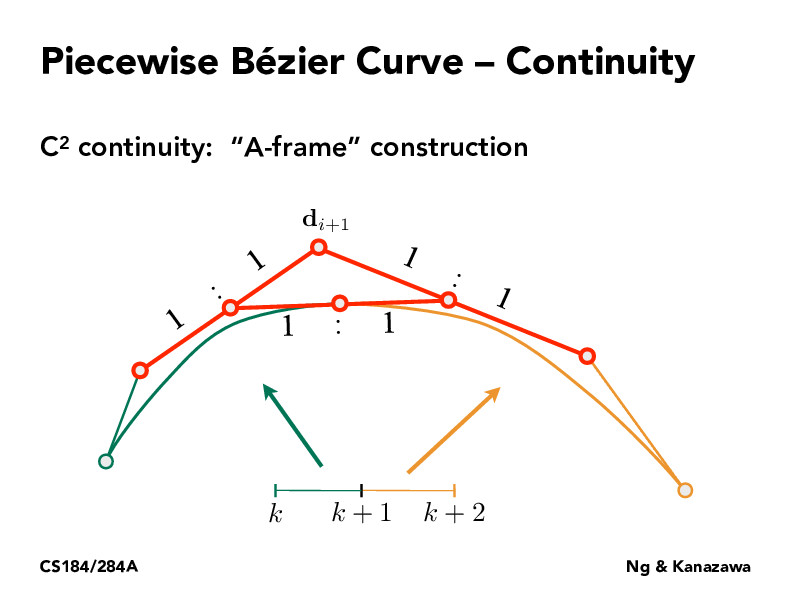
I'm a little bit confused on the whole A-frame Idea. It seems like with any three points, you have enough constraints to construct two cubic splines with those points (as well as associated control points). It seems like the C2 additional constraint might make the linear system not solvable. Wondering if someone can clarify this.
andywu1000
In understand the physical result C0 continuity (points intersect) and C1 continuity (smooth curve), but is there a physical intuition for why we would want to have C2 continuity?
pixelled
@aagarwal1999 Adding constraints doesn't make the linear system unsolvable. Our goal is to choose positions of control points in a way so that the two cubic splines are c1 and c2 continuous at the joint point. For the example in this slide, we have 4 control points and hence 8 degrees of freedom in 2D. With c1 and c2 constraints, we still have 3 degrees of freedom left, so it's solvable.
pixelled
[deleted]
pixelled
@andywu1000 C2 continuity corresponds to continuous curvature and there should be very subtle differences in smoothness between curves with c1 and c2 continuity. Hence they're visually almost the same while c2 is mathmatically smoother. Some discussions in depth: https://math.stackexchange.com/questions/1822023/graphical-explanation-of-the-difference-between-c1-and-c2-function
chetanaramaiyer
In lecture, professor mentioned that C1 continuity mean that the derivative is smooth and C0 functions means that the function is smooth. I'm confused then what c2 means and why we are trying to attain that here. I found the math stack exchange article linked above a bit confusing, as it mostly said the difference is subtle and C2 is very similar. I understand that we want to piece together smaller Bezier curves if we have a lot of points, but what is the purpose of the entire A-frame construction is.
I'm a little bit confused on the whole A-frame Idea. It seems like with any three points, you have enough constraints to construct two cubic splines with those points (as well as associated control points). It seems like the C2 additional constraint might make the linear system not solvable. Wondering if someone can clarify this.
In understand the physical result C0 continuity (points intersect) and C1 continuity (smooth curve), but is there a physical intuition for why we would want to have C2 continuity?
@aagarwal1999 Adding constraints doesn't make the linear system unsolvable. Our goal is to choose positions of control points in a way so that the two cubic splines are c1 and c2 continuous at the joint point. For the example in this slide, we have 4 control points and hence 8 degrees of freedom in 2D. With c1 and c2 constraints, we still have 3 degrees of freedom left, so it's solvable.
[deleted]
@andywu1000 C2 continuity corresponds to continuous curvature and there should be very subtle differences in smoothness between curves with c1 and c2 continuity. Hence they're visually almost the same while c2 is mathmatically smoother. Some discussions in depth: https://math.stackexchange.com/questions/1822023/graphical-explanation-of-the-difference-between-c1-and-c2-function
In lecture, professor mentioned that C1 continuity mean that the derivative is smooth and C0 functions means that the function is smooth. I'm confused then what c2 means and why we are trying to attain that here. I found the math stack exchange article linked above a bit confusing, as it mostly said the difference is subtle and C2 is very similar. I understand that we want to piece together smaller Bezier curves if we have a lot of points, but what is the purpose of the entire A-frame construction is.