It seems like this can be formulated as an optimization problem. You have some final end state that you want the system to be in, and given some initial conditions, you can compute the end state of the system. If you optimize over the initial conditions, you can solve the problem. Even if there is no closed form the final state of the system, you can still take gradient steps. This method would just be computational expensive.
grafour
I wonder what are some possible algorithms. Greedy?
sebzhao
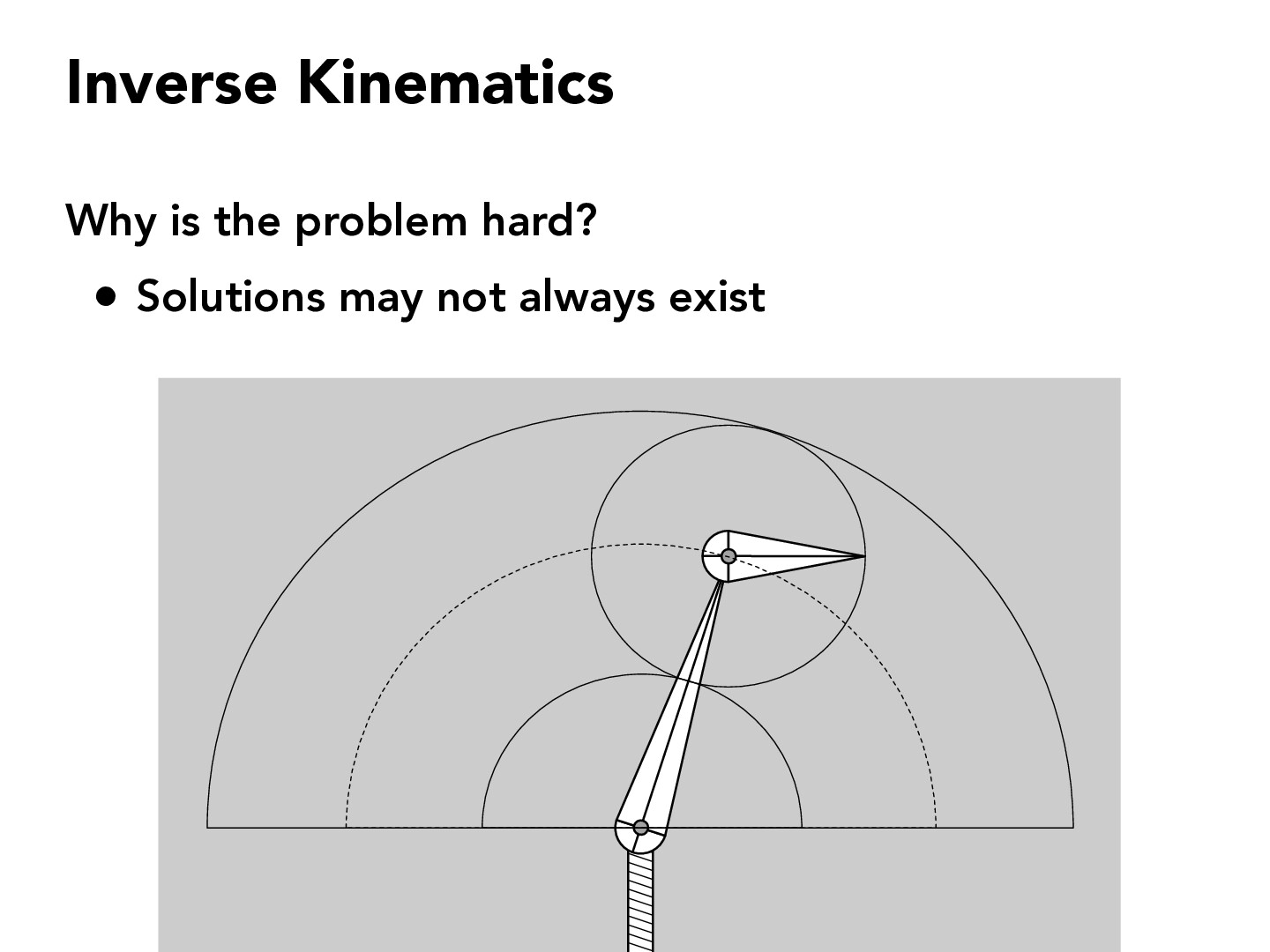
This is also a really hard problem in robotics because sometimes we only want to use the end effector position and want the overall pose to result in the end effector position, but the solution may not exist or could not be a good solution as it requires moving the other joints too much.
It seems like this can be formulated as an optimization problem. You have some final end state that you want the system to be in, and given some initial conditions, you can compute the end state of the system. If you optimize over the initial conditions, you can solve the problem. Even if there is no closed form the final state of the system, you can still take gradient steps. This method would just be computational expensive.
I wonder what are some possible algorithms. Greedy?
This is also a really hard problem in robotics because sometimes we only want to use the end effector position and want the overall pose to result in the end effector position, but the solution may not exist or could not be a good solution as it requires moving the other joints too much.