Lecture 17: Intro to Animation, Kinematics, Motion Capture (41)
john-b-yang
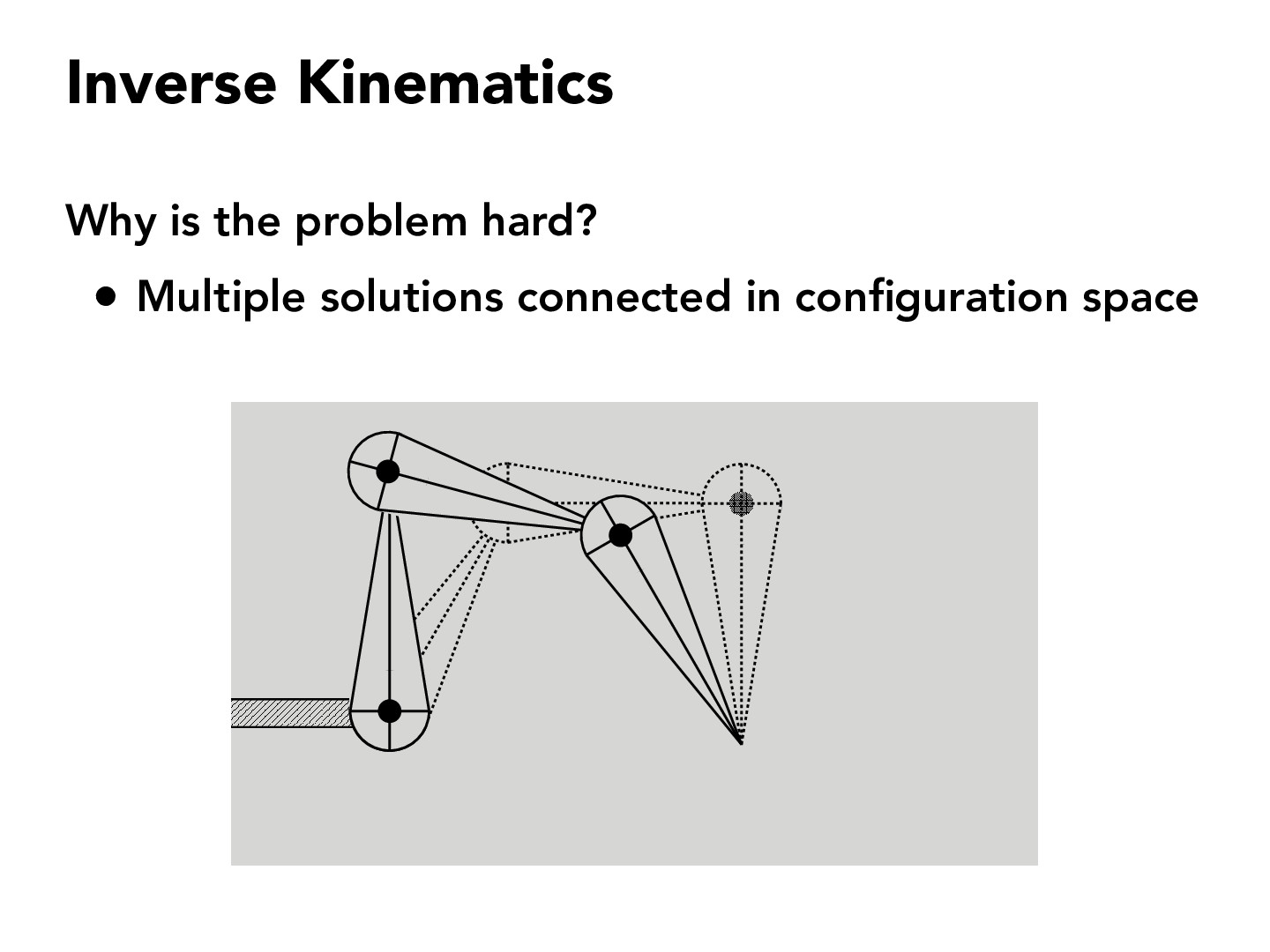
I think a helpful analogy may be to think about this with robots. With forward kinematics, one might input joint angles and the robot would output the coordinates of where certain parts of itself end up. With inverse kinematics, you could feed in the position of the robot's parts and recover the joint angles that led it to there. However, the second problem is not so easy because there could be multiple angles/paths/solutions to get there.
I think a helpful analogy may be to think about this with robots. With forward kinematics, one might input joint angles and the robot would output the coordinates of where certain parts of itself end up. With inverse kinematics, you could feed in the position of the robot's parts and recover the joint angles that led it to there. However, the second problem is not so easy because there could be multiple angles/paths/solutions to get there.