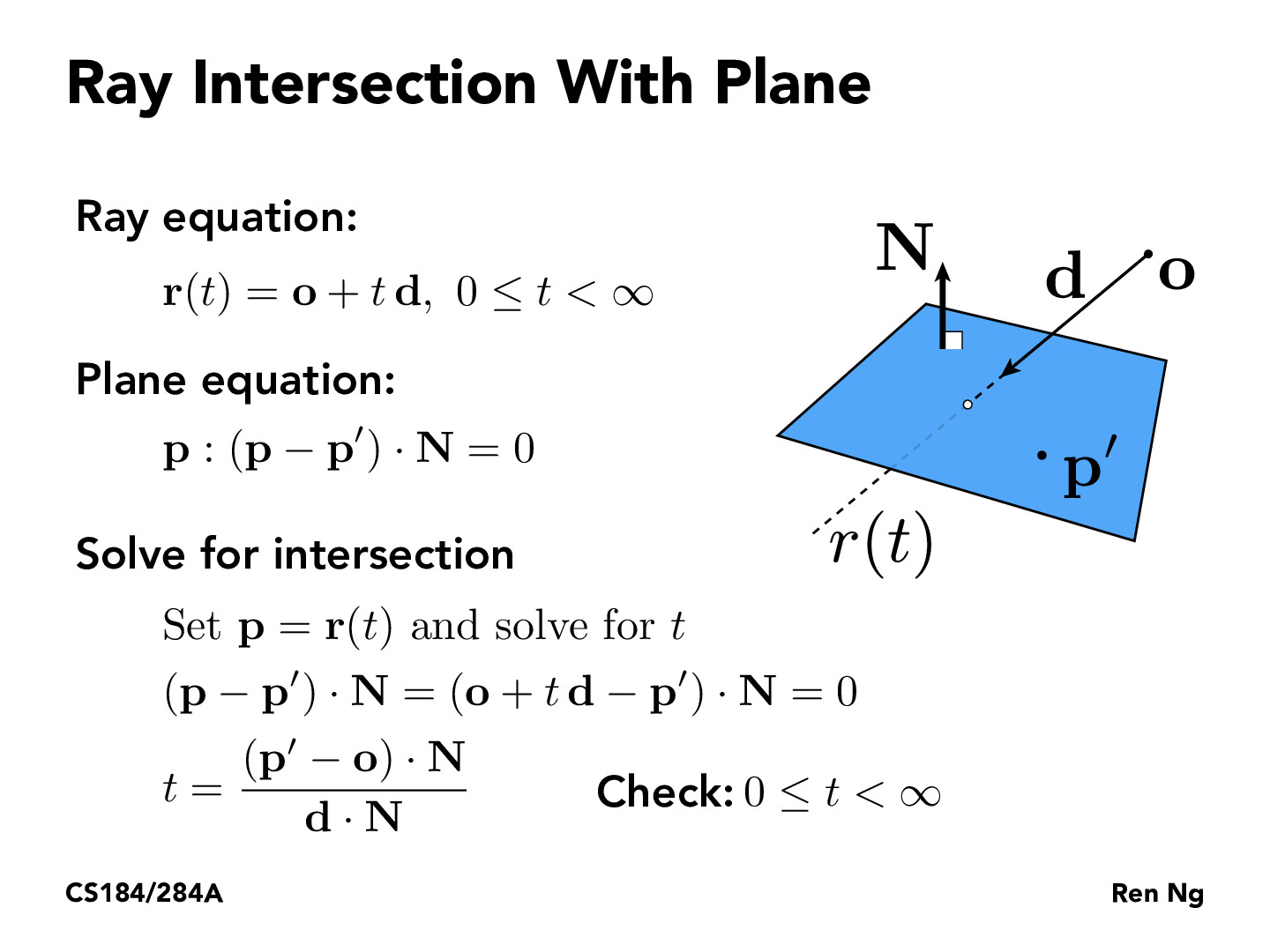
Can someone explain how they got the last step for solving t. I know Professor Ren said it's just moving parts, but I thought you couldn't do that if you had dot products.
ellinzhao
(o−p′)⋅N=−td⋅N
From here you can just divide out d⋅N because the result of the dot product is just a scalar
aninrusimha
A cool side note:
If d is perpendicular with N, then the dot product of d and N is going to be 0. This means the result is undefined, which makes sense as it that case there are either 0 solutions (o is not on the plane) or infinite solutions
Can someone explain how they got the last step for solving t. I know Professor Ren said it's just moving parts, but I thought you couldn't do that if you had dot products.
(o−p′)⋅N=−td⋅N
From here you can just divide out d⋅N because the result of the dot product is just a scalar
A cool side note: If d is perpendicular with N, then the dot product of d and N is going to be 0. This means the result is undefined, which makes sense as it that case there are either 0 solutions (o is not on the plane) or infinite solutions