Perhaps I just haven't gotten far enough in the slide content, however Im confused exactly this or more optimal than the original brute-force method. Wouldn't testing each volume hit be as computationally intensive as testing each object hit?
hfan9
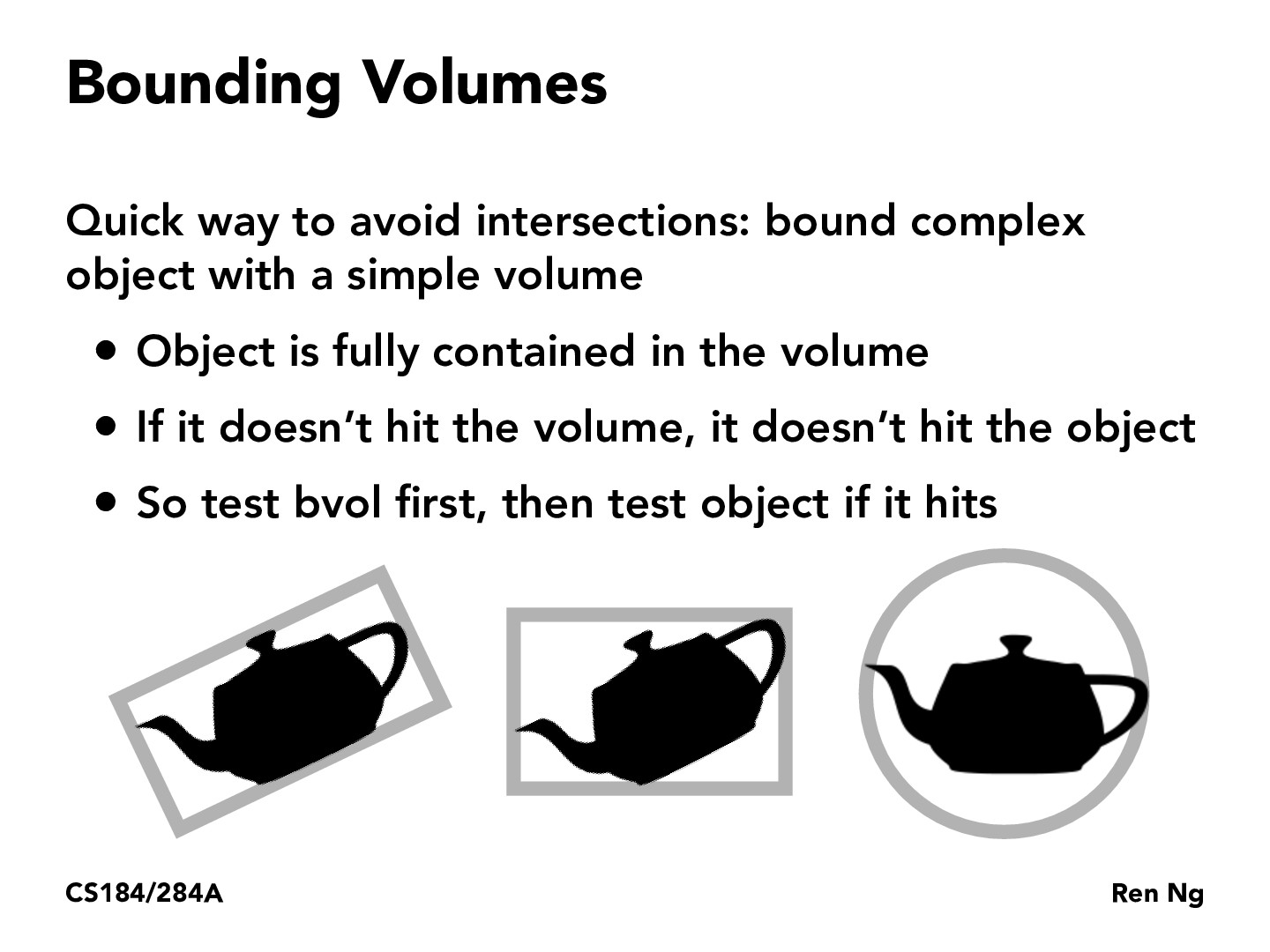
The idea is that complex objects are composed of multiple parts. It's not a simple shape with a simple equation, it's a composition of multiple shapes (e.g. meshes are lots of triangles). To normally test it, you'd have to test intersection with each of the individual parts, which could be millions of "checks". The bounding box is a crude approximation, so that you can first just do on "check". If it doesn't hit the box, then you can skip checking the individual pieces, saving you those millions of smaller "checks". If you do hit the box, you'd have to do the checks anyways (one extra won't hurt).
Here's an example of using these bounding boxes, and how it can be less computationally intensive. This is for hitboxes in a video game.
woakley5
Ahh I see that makes sense! Seems I was oversimplifying the possibilities of what defines a shape.
mylesdomingo
I think this slide oversimplifies what a more realistic bounding volume would look like.
The hitboxes in the previous comment indicate that more complex models, like human figures, are composed of several volumes for each limb, hinting that this teapot could be split into multiple parts for spout, container, handle, etc.
ravenseattuna
The teapot here is actually the standard computer graphics reference object, known as the Utah Teapot. It's typically used as one's first step into graphical modeling as the teapot is relatively simple to model, but contains complex elements such as saddle points, a hole in the handle, and shadows that are cast onto itself.
https://en.wikipedia.org/wiki/Utah_teapot
IsaacMerritt
Does there tend to be a 'best' bounding box option to try first to avoid the exhaustive check described in lecture? I would usually like to think that what Ren described (using grid lines) would usually be best in general, but is there any other rule to follow when selecting a geometric shape for the bounding box?
Perhaps I just haven't gotten far enough in the slide content, however Im confused exactly this or more optimal than the original brute-force method. Wouldn't testing each volume hit be as computationally intensive as testing each object hit?
The idea is that complex objects are composed of multiple parts. It's not a simple shape with a simple equation, it's a composition of multiple shapes (e.g. meshes are lots of triangles). To normally test it, you'd have to test intersection with each of the individual parts, which could be millions of "checks". The bounding box is a crude approximation, so that you can first just do on "check". If it doesn't hit the box, then you can skip checking the individual pieces, saving you those millions of smaller "checks". If you do hit the box, you'd have to do the checks anyways (one extra won't hurt).
Here's an example of using these bounding boxes, and how it can be less computationally intensive. This is for hitboxes in a video game.
Ahh I see that makes sense! Seems I was oversimplifying the possibilities of what defines a shape.
I think this slide oversimplifies what a more realistic bounding volume would look like.
The hitboxes in the previous comment indicate that more complex models, like human figures, are composed of several volumes for each limb, hinting that this teapot could be split into multiple parts for spout, container, handle, etc.
The teapot here is actually the standard computer graphics reference object, known as the Utah Teapot. It's typically used as one's first step into graphical modeling as the teapot is relatively simple to model, but contains complex elements such as saddle points, a hole in the handle, and shadows that are cast onto itself.
https://en.wikipedia.org/wiki/Utah_teapot
Does there tend to be a 'best' bounding box option to try first to avoid the exhaustive check described in lecture? I would usually like to think that what Ren described (using grid lines) would usually be best in general, but is there any other rule to follow when selecting a geometric shape for the bounding box?