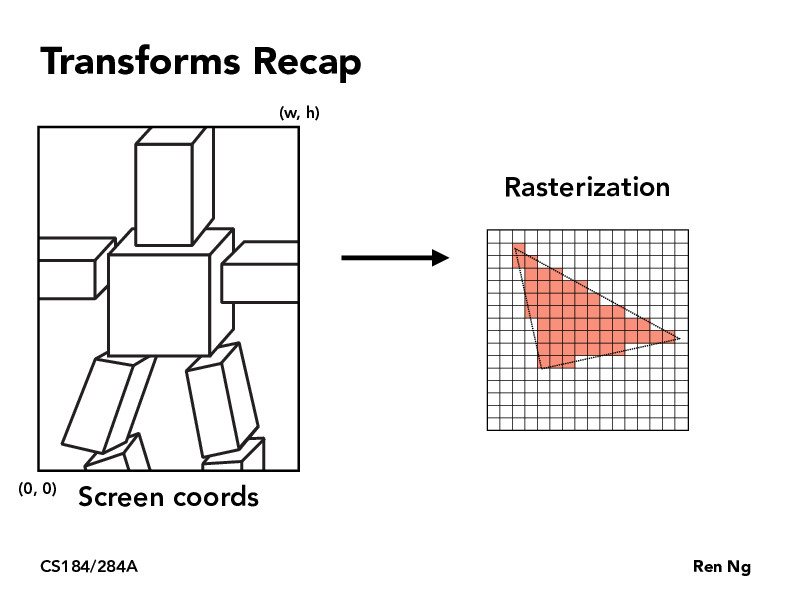
I understand how we got from the Object Coord to the World coord, and then from the World coord to the Camera, NDC, and finally the screen coord; however, I don't get what happened at the end for what we did for rasterization. I know how rasterization works, but I don't see how we got from a robot to this specific triangle. Where are these triangles coming from?
jk0524
I think after getting the screen coordinates of a triangle, you can rasterize and fill in the colors.
Staffkatamarisun
The triangle isn't a literal representation of the robot - @Evan the slide simple represents the transformation from geometric, mathematical data to visual pixel data, since scene data is not stored as pixels - that would be much too costly! But don't take the slide too literally :)
I understand how we got from the Object Coord to the World coord, and then from the World coord to the Camera, NDC, and finally the screen coord; however, I don't get what happened at the end for what we did for rasterization. I know how rasterization works, but I don't see how we got from a robot to this specific triangle. Where are these triangles coming from?
I think after getting the screen coordinates of a triangle, you can rasterize and fill in the colors.
The triangle isn't a literal representation of the robot - @Evan the slide simple represents the transformation from geometric, mathematical data to visual pixel data, since scene data is not stored as pixels - that would be much too costly! But don't take the slide too literally :)