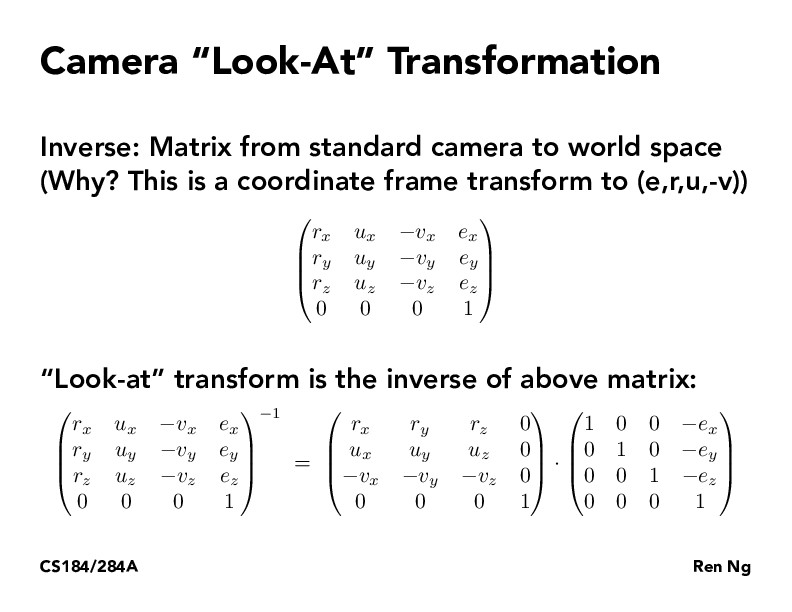
Why is the "matrix from standard camera to world space" defined as it is in this slide?
I would've expected this matrix to be the exact opposite (ie: the "matrix from world space to camera space") because we defined the coordinate system transform as a matrix of basically [u,v,o] where u,v are basis vectors and o is the origin. Given that, it seems like all we need to do is plug in the camera's equivalent u,v,o vectors to get the "Look-at" transformation.
It's possible I have a misunderstanding of what the "look-at" transform is supposed to be, but I just expected it to be a simple coordinate transform and this slide seems to suggest otherwise.
AidanJDeAngelis
@lakerpaxtan I may be wrong, but my understanding is that we are shifting our coordinate system, not transforming an object to a new coordinate system. https://cs184.eecs.berkeley.edu/sp20/lecture/4-41/transforms captures this. A coordinate-shifting transform is the inverse of the equivalent direct transform of an object within the space.
Staffkatamarisun
@Aidan brings up a very fundamental property of coordinate transforms in general. In physics, this duality is represented by covariant vs contra-variant transformations, and is a much, much deeper topic than needs to be considered here, but Wikipedia and other videos can be good starting points to learning about them!
Why is the "matrix from standard camera to world space" defined as it is in this slide?
I would've expected this matrix to be the exact opposite (ie: the "matrix from world space to camera space") because we defined the coordinate system transform as a matrix of basically [u,v,o] where u,v are basis vectors and o is the origin. Given that, it seems like all we need to do is plug in the camera's equivalent u,v,o vectors to get the "Look-at" transformation.
It's possible I have a misunderstanding of what the "look-at" transform is supposed to be, but I just expected it to be a simple coordinate transform and this slide seems to suggest otherwise.
@lakerpaxtan I may be wrong, but my understanding is that we are shifting our coordinate system, not transforming an object to a new coordinate system. https://cs184.eecs.berkeley.edu/sp20/lecture/4-41/transforms captures this. A coordinate-shifting transform is the inverse of the equivalent direct transform of an object within the space.
@Aidan brings up a very fundamental property of coordinate transforms in general. In physics, this duality is represented by covariant vs contra-variant transformations, and is a much, much deeper topic than needs to be considered here, but Wikipedia and other videos can be good starting points to learning about them!